
ทดสอบใช้งานบอร์ด Controller ร่วมกับ LoRaWAN by CAT
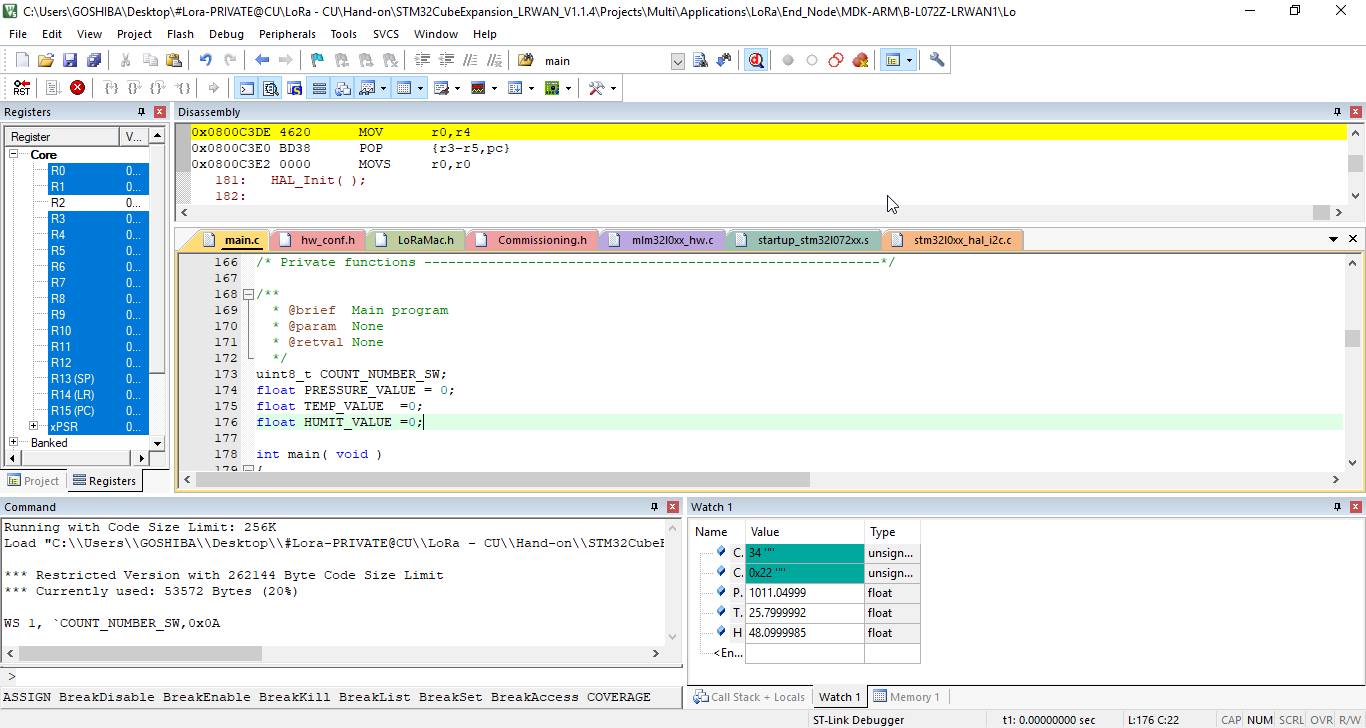
วันนี้จะมาเล่า ผลการทดลองที่ผมและพี่ๆเพื่อนๆ Maker พร้อมด้วยทีมงาน LoRa IoT by CAT ได้นัดหมายกันเพื่อจะทดสอบการทำงานระหว่างบอร์ดคอนโทรลเลอร์ต่างๆ ที่นอกเหนือจาก บอร์ดจากค่าย ST ที่ทาง ทีมงาน CAT ได้จับมือเดินสายอบรมเผยแพร่ บริการ LoRa IoT ที่ CAT กำลังจะเปิดให้บริการ โดยผมเองได้มีโอกาสเข้าร่วมการอบรมพิเศษ รอบประถมฤกษ์ ที่จัดขึ้นที่ จุฬาฯ ในวันที่ 1-2 กุมภาพันธ์ 2561 ที่ผ่านมา จากการเข้าร่วมครั้งนั้น สังเกตปัญหาที่เกิดขึ้นกับผู้เข้าร่วมที่เป็นน้อง นักศึกษา สาขาวิชาอื่นๆที่ไม่มีพื้นด้านการเขียนโปรแกรม พบว่ามีความยากลำบากในการทำความเข้าใจเนื้อหาอยู่พอสมควร น่าจะเนื่องด้วยเครื่องมือและรูปแบบในการพัฒนาของ ST นั้นมีความลึกซึ้งซับซ้อนตามสไตล์เทคโนโลยีเพื่อการผลิตและพัฒนาผลิตภัณฑ์ ส่วนตัวผมมองว่าเครื่องมือซับซ้อนที่ว่า จัดว่าเตรียมมาให้อย่างครบครันและซะใจสาย Hardware อย่างผมพอสมควรเลยทีเดียวเพราะสามารถดีบั๊กค่าต่างๆรวมถึงเข้าถึงรีจิสเตอร์ภายในผ่านเครื่องมือต่างๆได้อย่างง่ายดาย
แต่พอมามองในมุมของน้องนักศึกษาที่เข้าร่วมด้วย เห็นอุปสรรคชัดเจนเลยว่าน้องๆที่ไม่มีพื้นจะย่อยเนื้อหาได้ยากมาก จนถึงกับมีเอ่ยปากกัน จึงได้สอบถามว่าน้องมีพื้นมาอย่างไรบ้าง น้องก็บอกว่าตนเองฝึกฝนและศึกษาด้วยตนเองผ่านมาจากสภาพแวดล้อมของ Arduino Platform ผมก็จึงเสวนาต่อจนได้ความว่า ตัวเขามีโครงการที่ทำระบบมอนิเตอร์คุณภาพอากาศแบบไร้สายโดยจะติดตั้งบนรถยนต์ที่เคลื่อนที่ด้วย เดิมใช้การส่งผ่าน 3G และระบบก็ทำงานได้แล้วในระดับนึง แต่เห็นว่าทาง ทีมงาน CAT เข้ามาแนะนำการใช้งาน LoRa มองว่าเป็นรูปแบบการสื่อสารที่น่าสนใจและน่าจะเหมาะกับโครงการของตน จึงเข้ามาเรียนรู้ด้วย แต่เกิดอาการ Learning Shock เพราะเจอจังๆเข้ากับเครื่องมือของ ST ก็ถึงกับหงายเงิบไปเลยเหมือนกัน ผมเองก็ได้แต่ให้กำลังใจว่าสู้ๆ อย่างน้อยเราก็ได้มีโอกาสศึกษาตรงนี้แล้วก็ให้มองว่าเป็นประสบการณ์ไป สรุปวันนั้นก็จบการอบรมกันชนิดความรู้ทะลักหัวกันไปตามๆกันเพราะเนื้อหาอัดแน่นมากเทียบกับเวลาที่ใช้เพราะครั้งนี้เป็นครั้งแรก ในการจัดการอบรมถือว่าเป็นการทดลองสอนเพื่อทดสอบเนื้อหาก่อนที่จะมีการจัดอบรมจริงๆไปในตัว ก็มีการพูดคุยแนะนำว่าควรปรับเนื้อหาอย่างไรไปด้วยเช่นกัน
หลังจากจบกิจกรรมผมก็มีความคิดขึ้นว่า เป็นแบบนี้ในตอนนี้หากต้องการพัฒนาคงต้องพึ่งพาบอร์ดจากค่าย ST อย่างแน่นอน เพราะเป็นบอร์ดเดียวที่มีการทดลองกับทางเครือข่ายของ CAT แล้ว แต่ด้วยเห็นว่าอุปสรรคในการเรียนรู้กับผู้สนใจกลุ่มอื่นๆที่ไม่ได้มีพื้นมาก่อน เขาเหล่านั้นจะทำอย่างไร และเราจะทำอย่างไรได้บ้างให้เขาเหล่านั้นเข้าถึงและใช้งานเครือข่ายของ CAT ได้ง่ายขึ้นและสามารถพัฒนาอยู่บนสภาพแวดล้อมอื่นๆที่ทุกคนคุ้นเคยได้ จึงตัดสินใจปรึกษาและขอนัดหมายเพื่อนำบอร์ดอื่นๆเข้าทดสอบกับทีมงาน CAT โดยใช้พื้นที่ของ จุฬาฯ ในการทดสอบเพราะมีสัญญาณที่สามารถใช้ทดสอบได้ และถ้าสมมติฐานเป็นจริง ผมก็อยากจะร่วมผลักดันกับ อ. ในการเปิดพื้นที่ให้ผู้สนใจได้เข้ามาใช้มาเรียนรู้กับเจ้าเทคโนโลยีตัวนี้
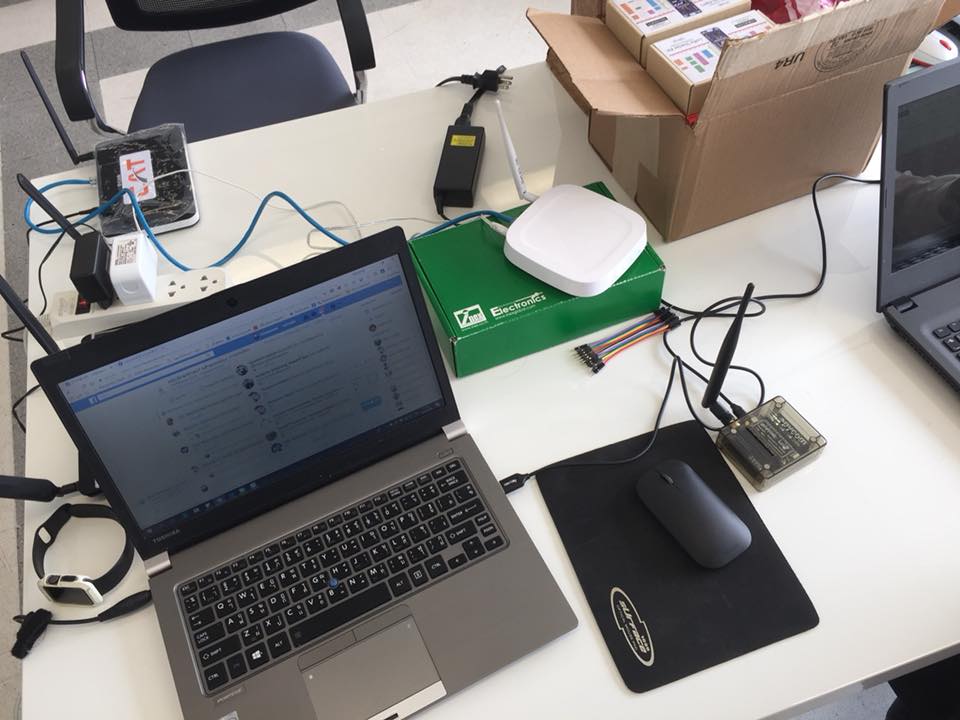


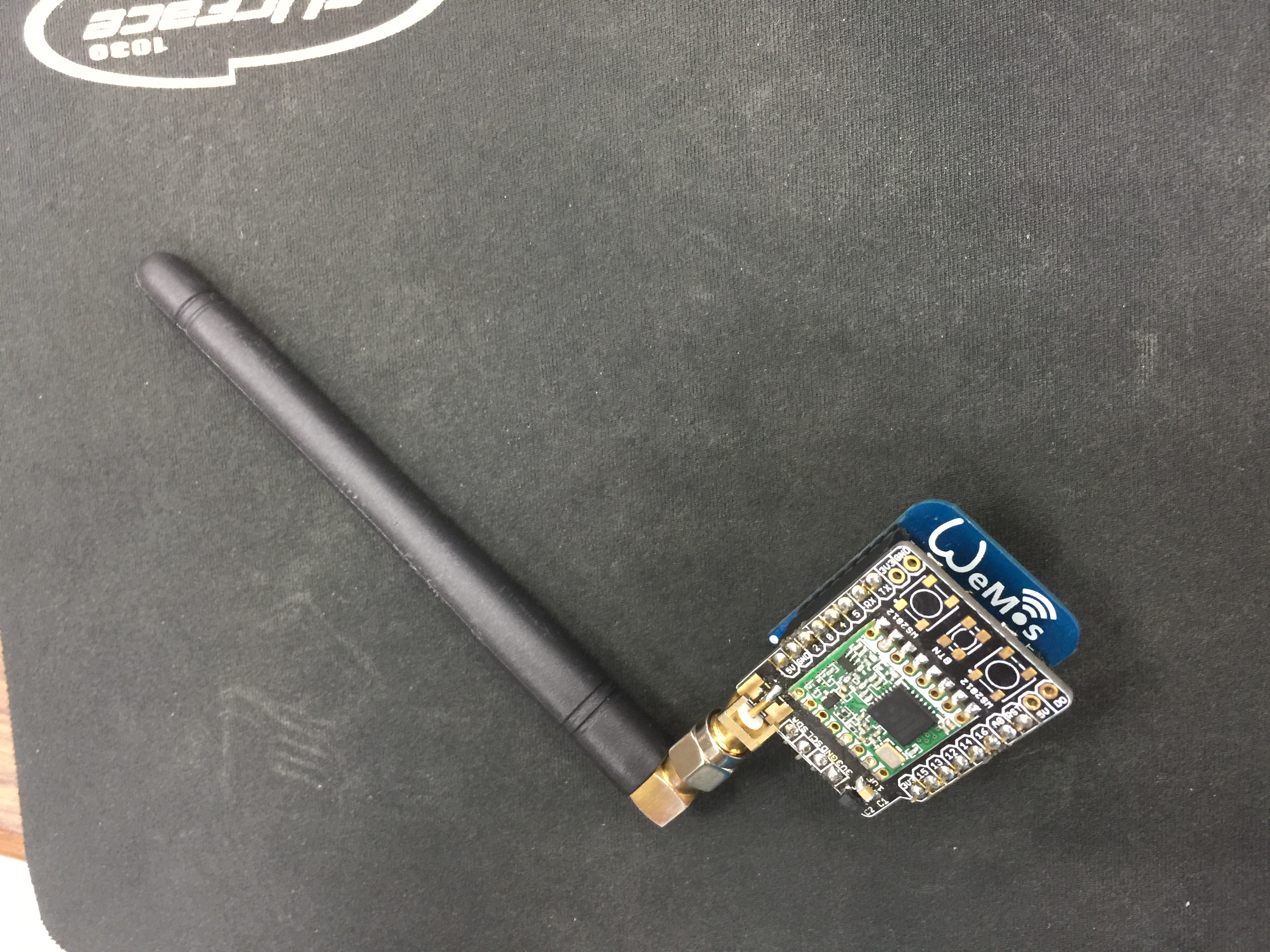
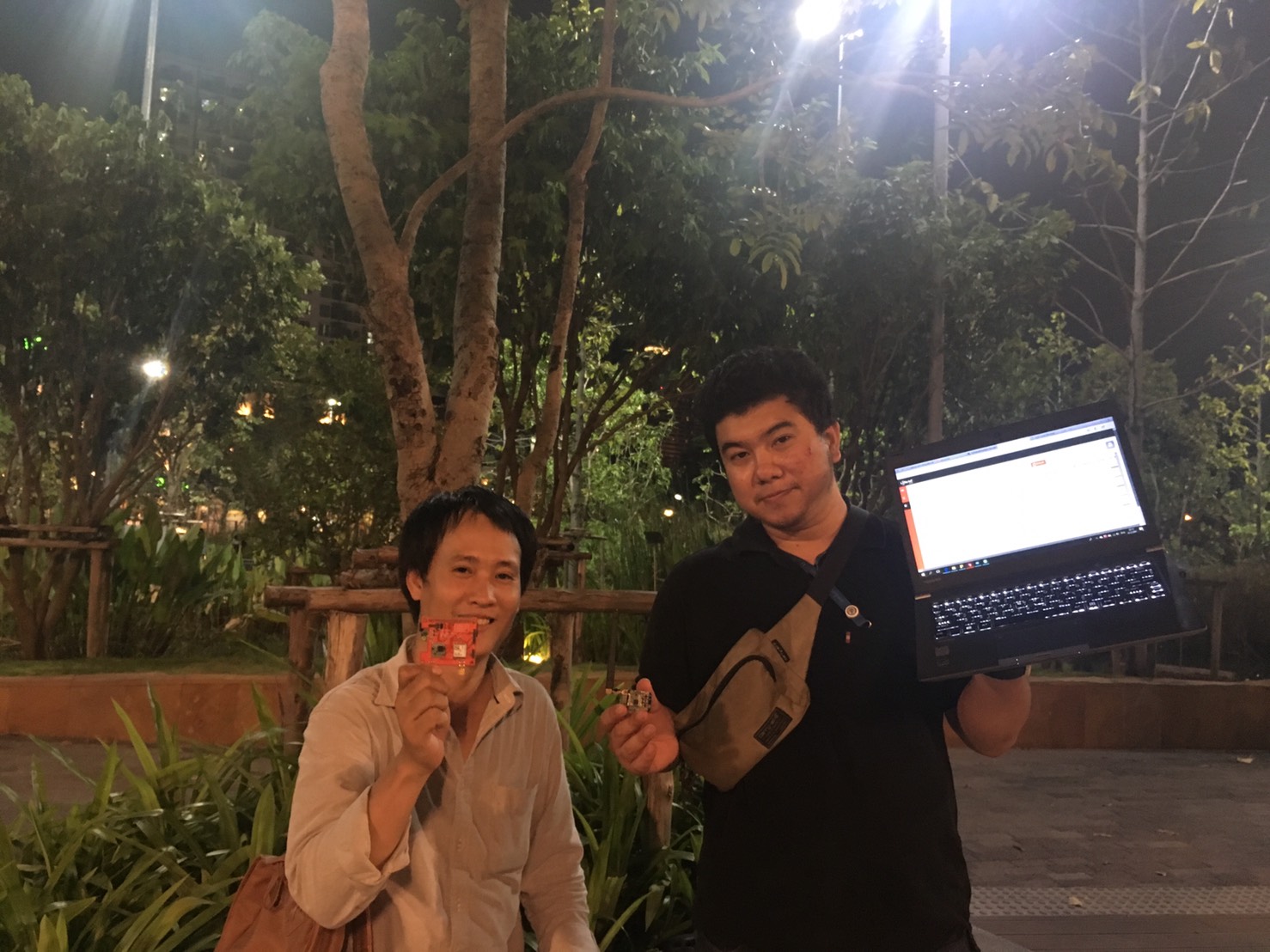
จึงเป็นที่มาในการทดลอง ในวันที่ 20 กุมภาพันธ์ 2561 โดยสถานที่ ที่เราใช้ในการตั้งฐานการทดสอบใช้เป็น Co Working Space ของคณะวิศวกรรม ซึ่งตั้งอยู่ที่ ชั้น 6 อาคาร 100 ปี วิศว จุฬาฯ เมื่อถึงเวลานัดหมายทีมงานและผู้เกี่ยวข้องก็มารวมตัวกัน โดยผมนั้นได้เตรียมบอร์ดเท่าที่จะหาในบ้านเรามาด้วย รายการของบอร์ดก็มีความหลากหลายมาก ประกอบด้วย บอร์ด LoPy จาก Pycom ที่พัฒนาโดยใช้ภาษา microPython ตามมาด้วย บอร์ด TTGO ซึ่งเป็นบอร์ด หน้าตาดุดันโดยที่ภายในได้รวมการทำงานของ ESP32 กับชิพ LoRa พร้อมจอ OLED มาพร้อมให้ในบอร์ดเดียว และท้ายสุดคือบอร์ด RaspberryPi ที่ประกบกับบอร์ดสื่อสารโมดูล LoRa พร้อมด้วย โมดูล GPS

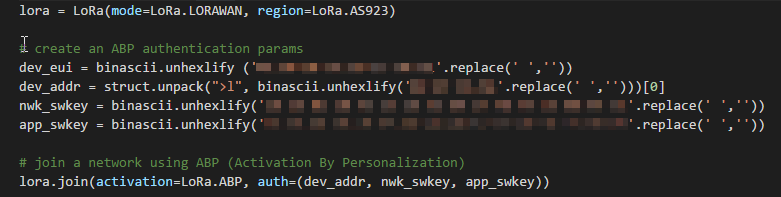
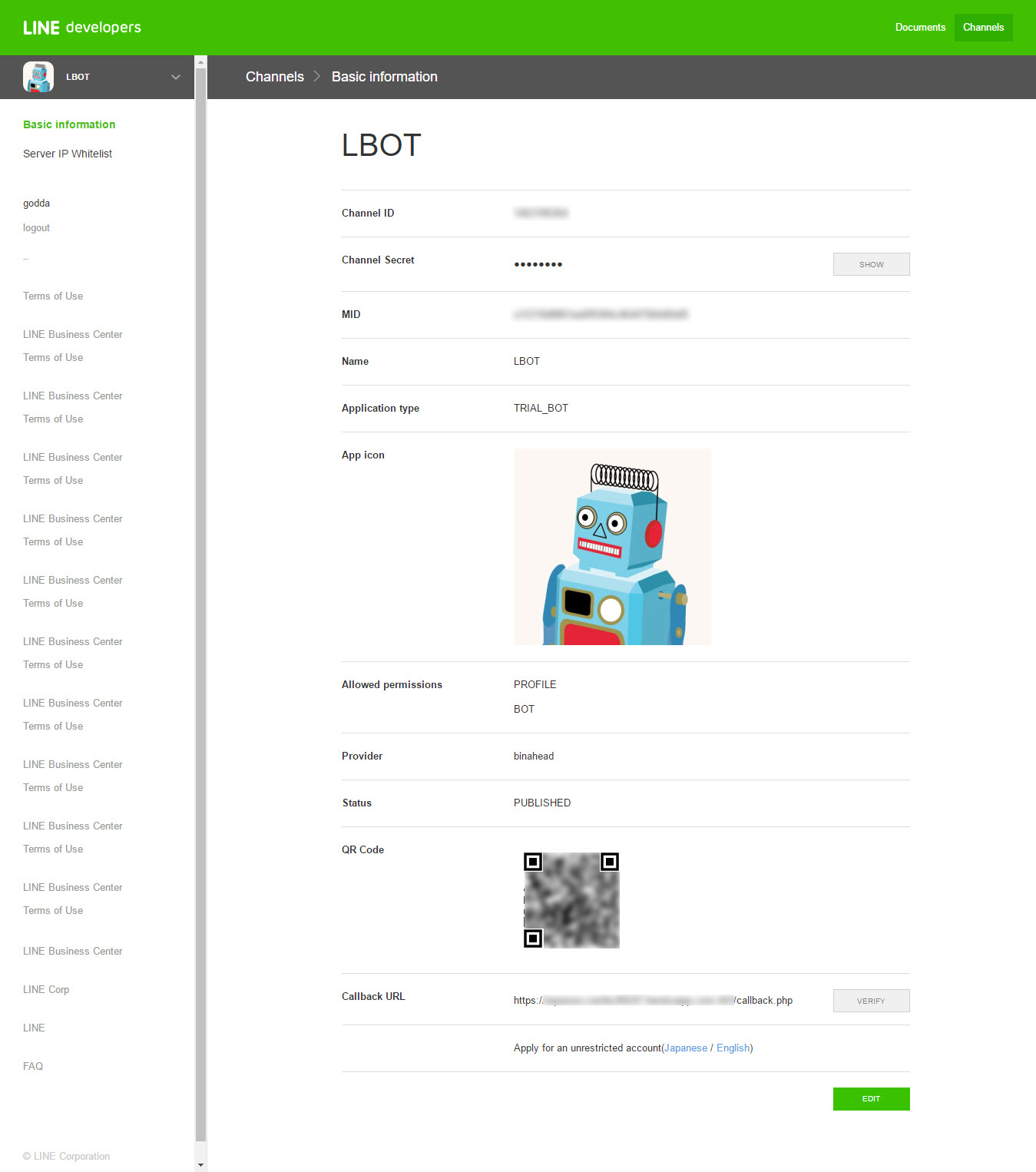
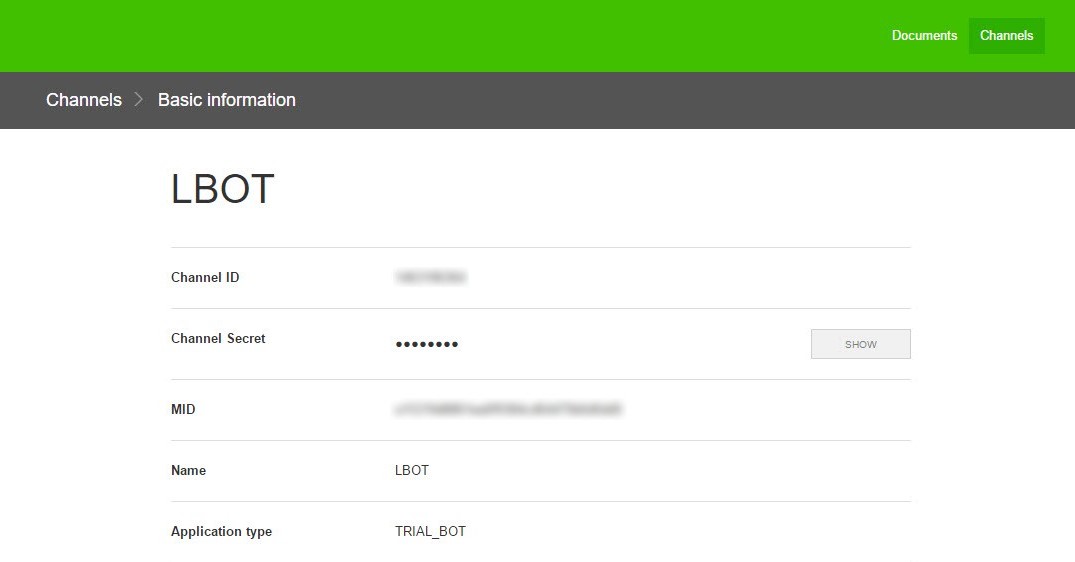
เราเริ่มต้นด้วยทีมงาน CAT สร้างแอคเคาท์ให้เพื่อใช้งานพร้อมมอบ Key ที่จำเป็นต่างๆในการสื่อสารกับ gateway ของ CAT ที่ให้บริการ โดยครั้งนี้เราทดสอบด้วยรูปแบบการยืนยันตนของ NODE แบบ ABP แต่แว่วว่าในอนาคต CAT น่าจะให้บริการในลักษณะของ OTAA ด้วยฉะนั้นวันนี้ค่าที่จำเป็นในการเข้าเชื่อมต่อในรูปแบบของ ABP จึงมีดังนี้
DEV_EUI
DEV_ADDR
NETWORK_KEY
APP_KEY
โดยค่าทั้งหมดนั้น ทางทีม CAT เป็นผู้กำหนดให้ ถึงตรงนี้บางท่านที่ทดลองเล่นกันเป็นส่วนตัวมาบ้างคงจะมีคำถามว่า อ้าว ทำไม DEV_EUI ทำไมไม่ดึงจากค่าของบอร์ดละ ครับคำถามนี้ผมก็สงสัยจึงสอบถามกับทีมงานว่าทำไมถึงเลือกแนวทางนี้ ทางทีมงานก็ให้เหตุผลที่น่าสนใจว่า กรณีว่าเราจะเอาจากบอร์ดจริงๆก็ทำได้และมันก็ทำให้ unique ได้ง่ายกว่าด้วย แต่ข้อเสียมันก็มีอยู่นั่นคือ หากเรายึดถือค่าดังกล่าวในการอ้างอิงเกิดวันนึงบอร์ดนั้นพังแล้วจำเป็นต้องเปลี่ยนบอร์ดใหม่ เลขชุดเก่าก็จะยกเลิกไปตามบอร์ดที่เสีย พอแบบนี้เราก็ต้องไปแก้ไขหรือกำหนดค่าตามค่าจากบอร์ดใหม่ที่มาทดแทน แต่ถ้าเกิดเราใช้ค่าที่ สร้างขึ้นมาโดยทีม CAT เป็นคนช่วยสร้างให้มันย่อม unique บนโครงข่ายของ CAT อย่างแน่นอน แต่ครับแต่ แต่ถ้าเอาบอร์ดที่ ref ด้วยค่าแบบนี้ไปเข้ากับเครือข่าย LoRaWAN อื่น อาจจะเจอการชนกันของค่านี้ก็เป็นได้ เพราะค่านี้มันเกิดจากการกำหนดเองต่างหาก ย่อมมีโอกาสชนได้ แต่ก็แลกมาด้วยความสะดวกที่เราสามารถเปลี่ยนบอร์ดใหม่ทดแทนแล้วกำหนดค่าตามเดิมได้ทันที ก็ต้องวางแผนและมองเรื่องนี้ไว้ให้ดีกรณีใครที่ต้องการทำ บริการที่สามารถเกาะข้ามไปข้ามมาระหว่างเครือข่ายของ CAT กับเครือข่ายอื่นๆที่อาจจะเป็น gateway ที่สร้างกันขึ้นมาเองหรือผู้ให้บริการเจ้าอื่นๆ
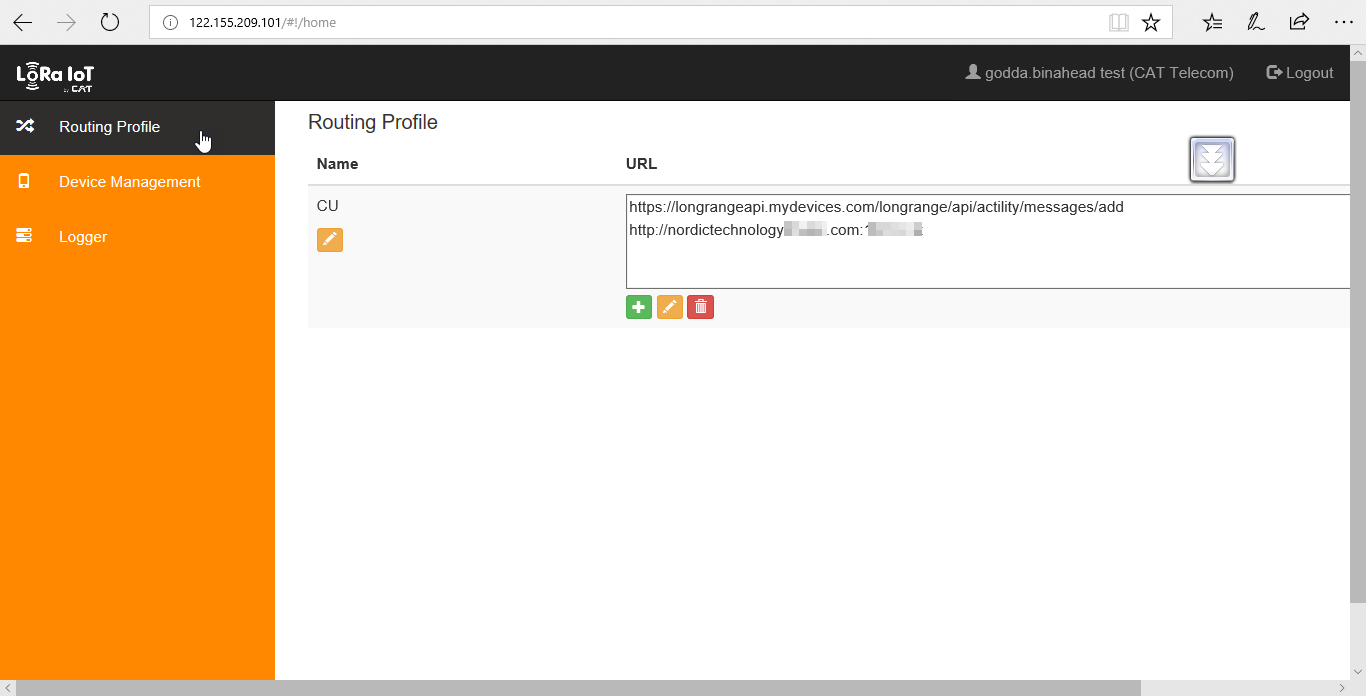
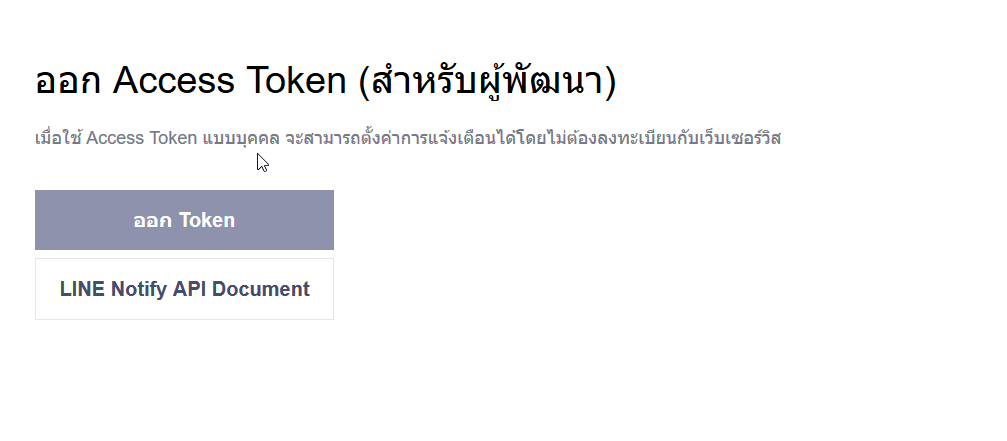
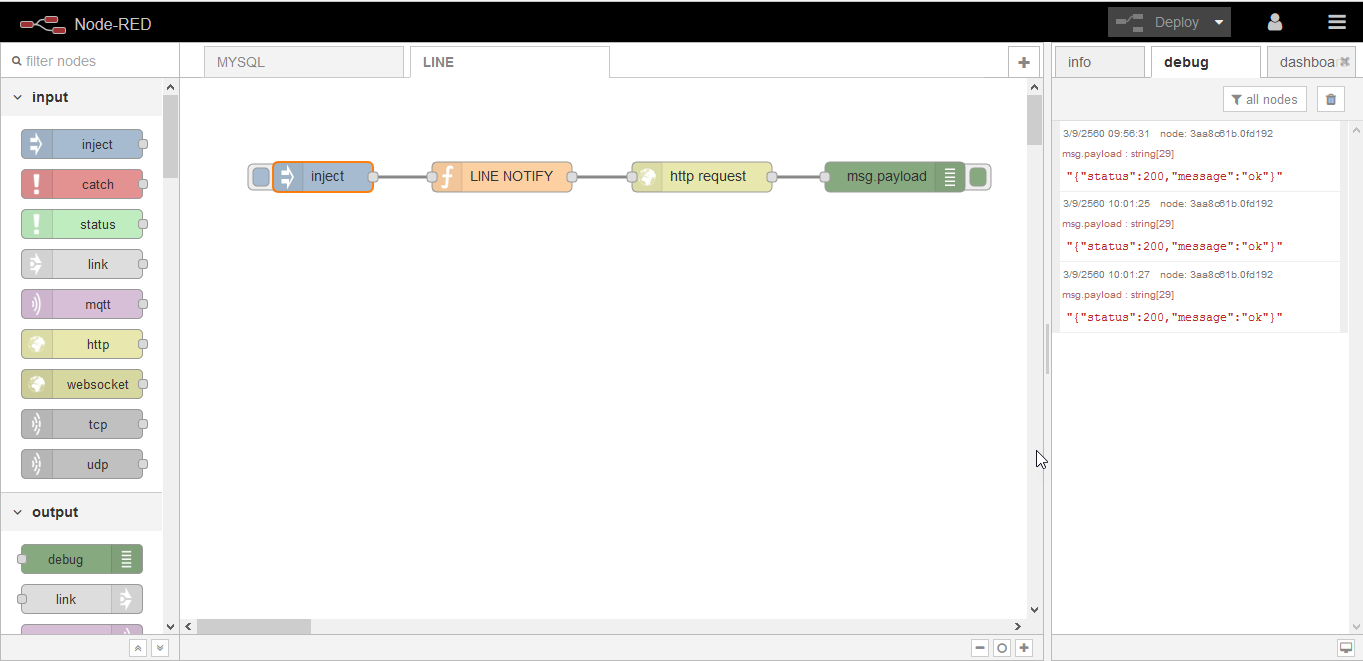
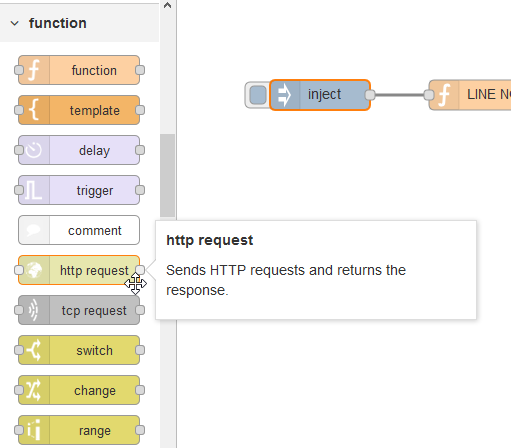
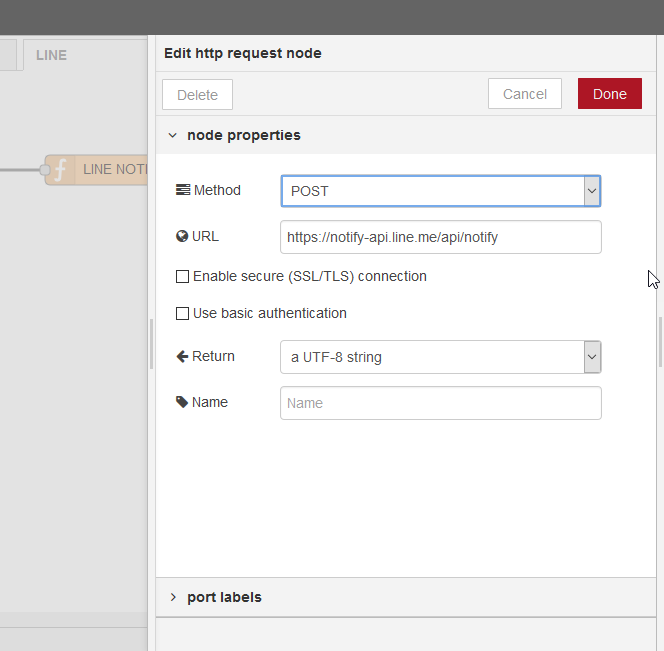
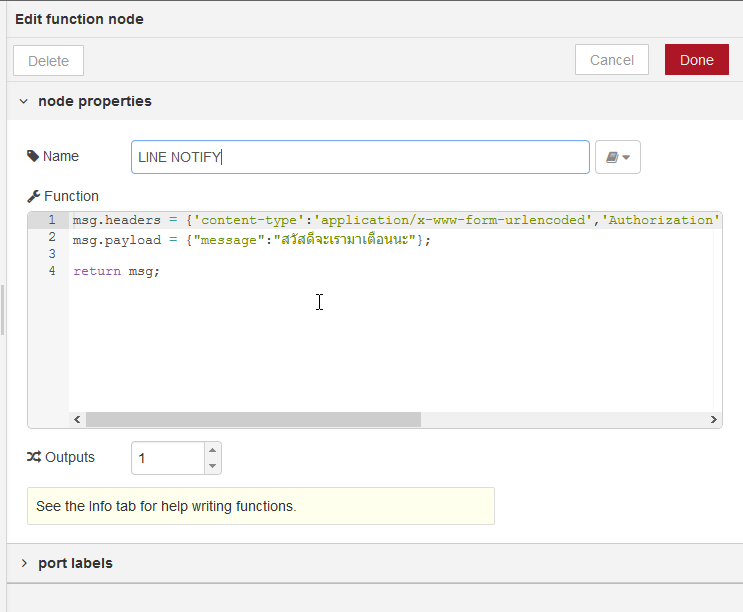
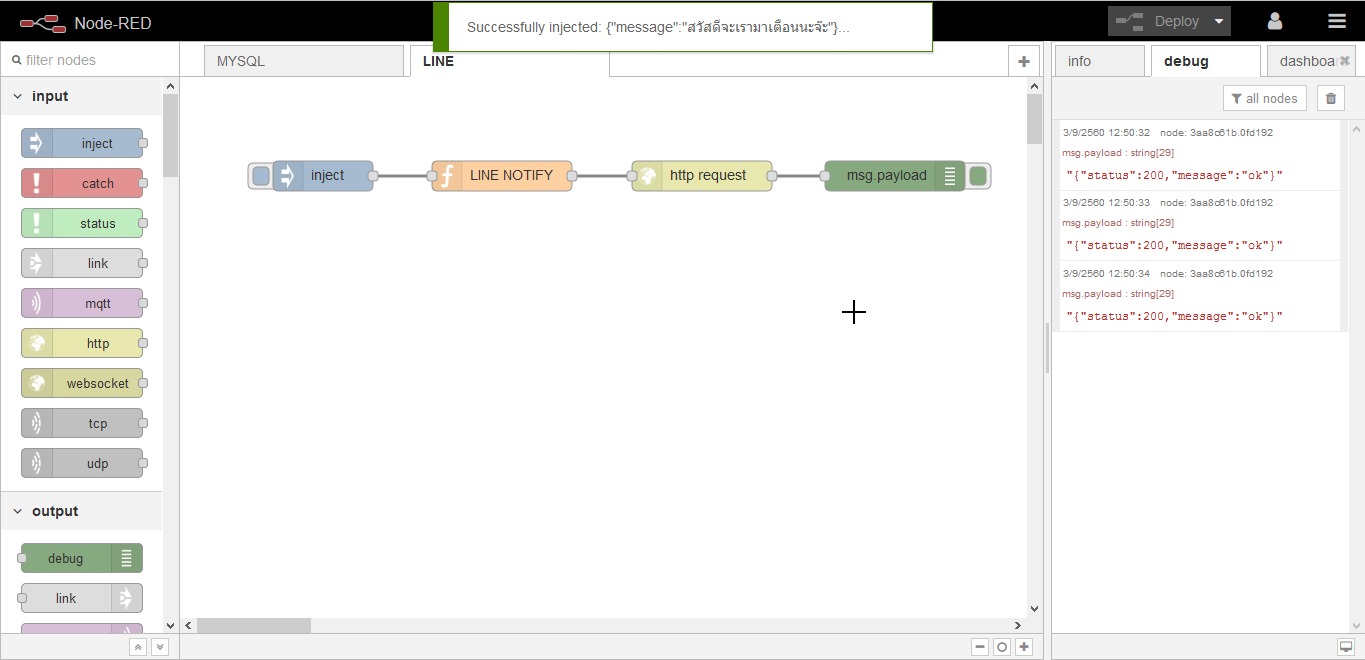
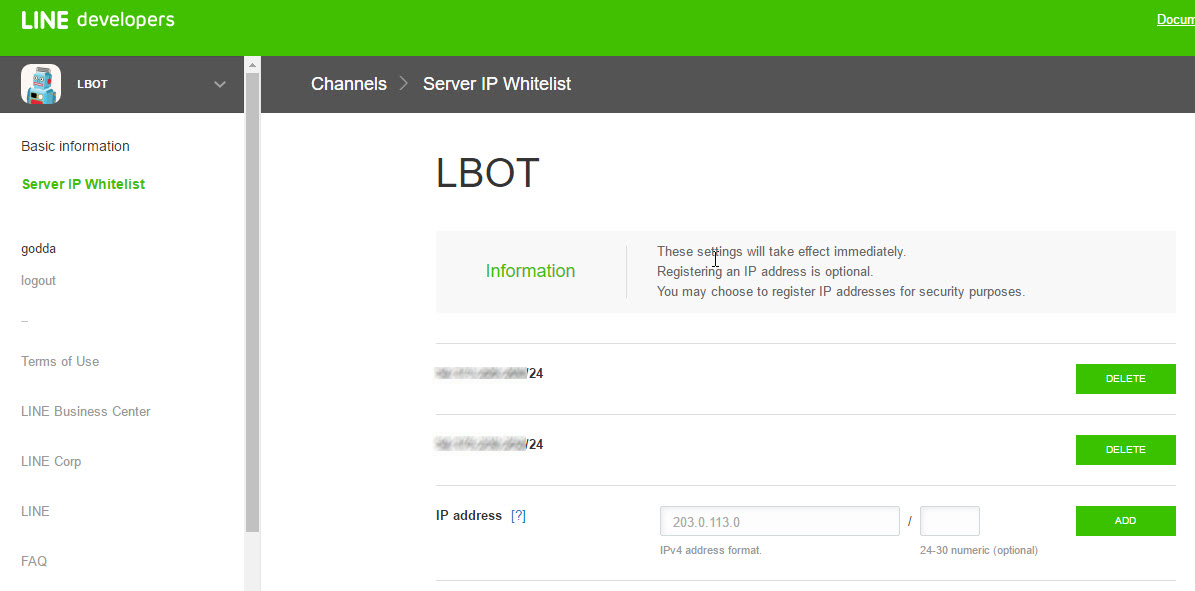
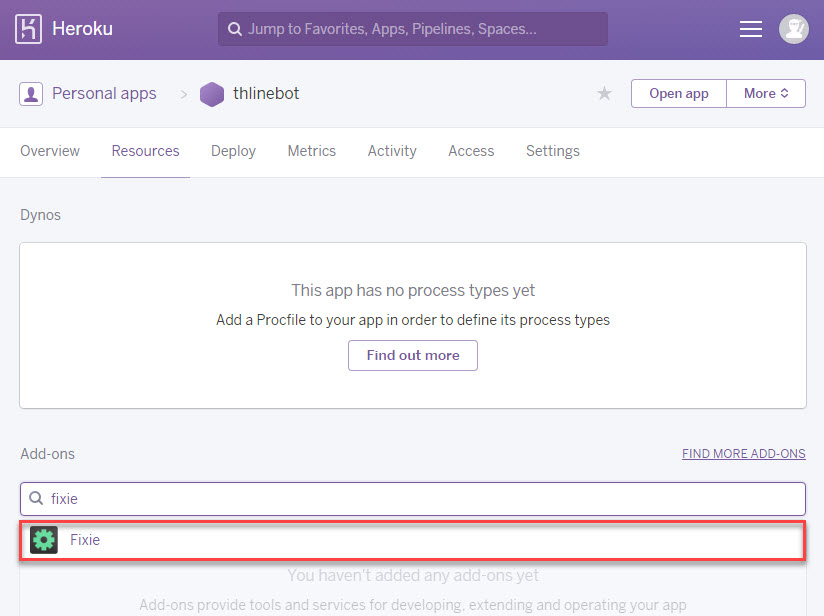
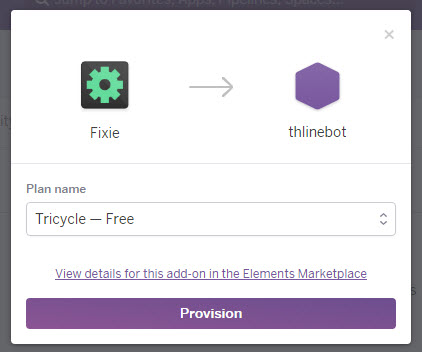
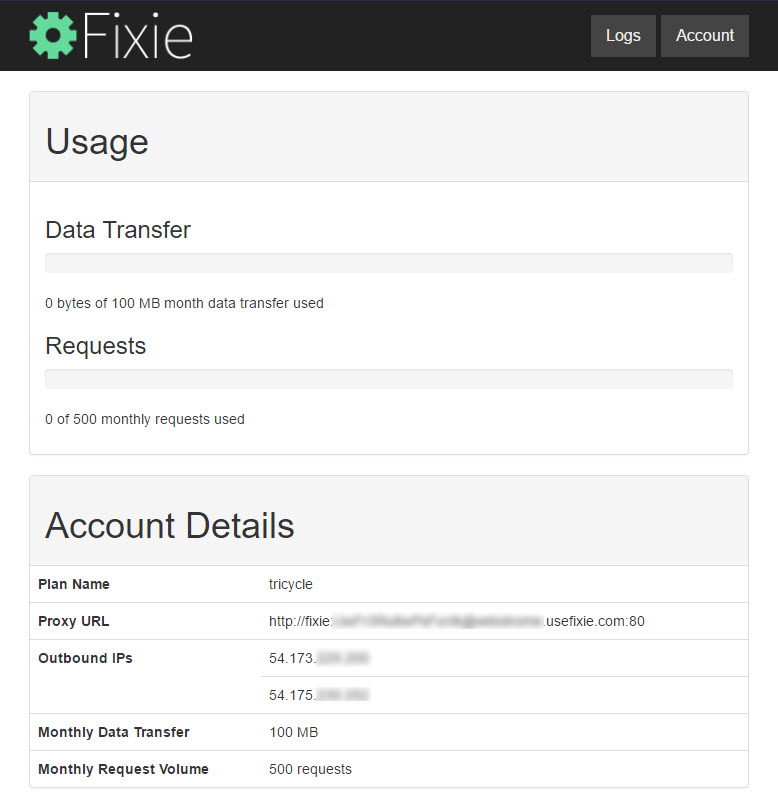
เอาละเราได้ค่าต่างๆมาแล้ว คราวนี้ก็มาถึงช่วงสำคัญนั่นคือการเพิ่ม ENDPOINT ให้กับ NODE ของเราผ่านทางหน้าจัดการของ CAT ซึ่งหน้าต่างนี้คนที่พึ่งเข้าอบรมกับทาง CAT เมื่อไม่กี่วันที่ผ่านน่าจะคุ้นตากันบ้างแล้ว โดยเราจะกำหนดกันที่ส่วนของ Routing Profile ตรงนี้ทาง CAT ก็ทำการบ้านมาดี มีให้กำหนดได้ทั้งแบบ HTTP และ MQTT โดยตอนนี้ส่วนของ MQTT จะยังไม่เปิดให้ทดลองใช้ ทางทีมทดสอบเลยเลือกสร้าง HTTP API ไว้ลองรับการส่งข้อมูลจาก ระบบของ CAT ลงไป โดยในวันนี้ทาง CAT เองก็ได้ให้ลองใส่ค่า endpoint ที่เป็นของ cayenne ลงไปด้วยเพื่อทดสอบตามฟอร์แมตที่ CAT ใช้นำเสนออยู่เวลาที่จัดอบรม แต่ด้วยความซนทีมงานเราก็เลือกเพิ่มส่วนที่เชื่อมต่อไปยัง server ที่เรามีเข้าไปด้วย จากตรงนี้ทุกท่านจะเห็นว่าการส่งต่อข้อมูลจาก โครงข่ายของ CAT ทำออกมาได้เรียบง่ายและใช้งานได้ดีทีเดียวหลักง่ายๆคือ อะไรก็ตามที่ผ่านเข้ามาจากเครือข่ายของ CAT จะยิงส่งต่อไปยังปลายทางที่เรากำหนดไว้ได้เลย สบายๆ
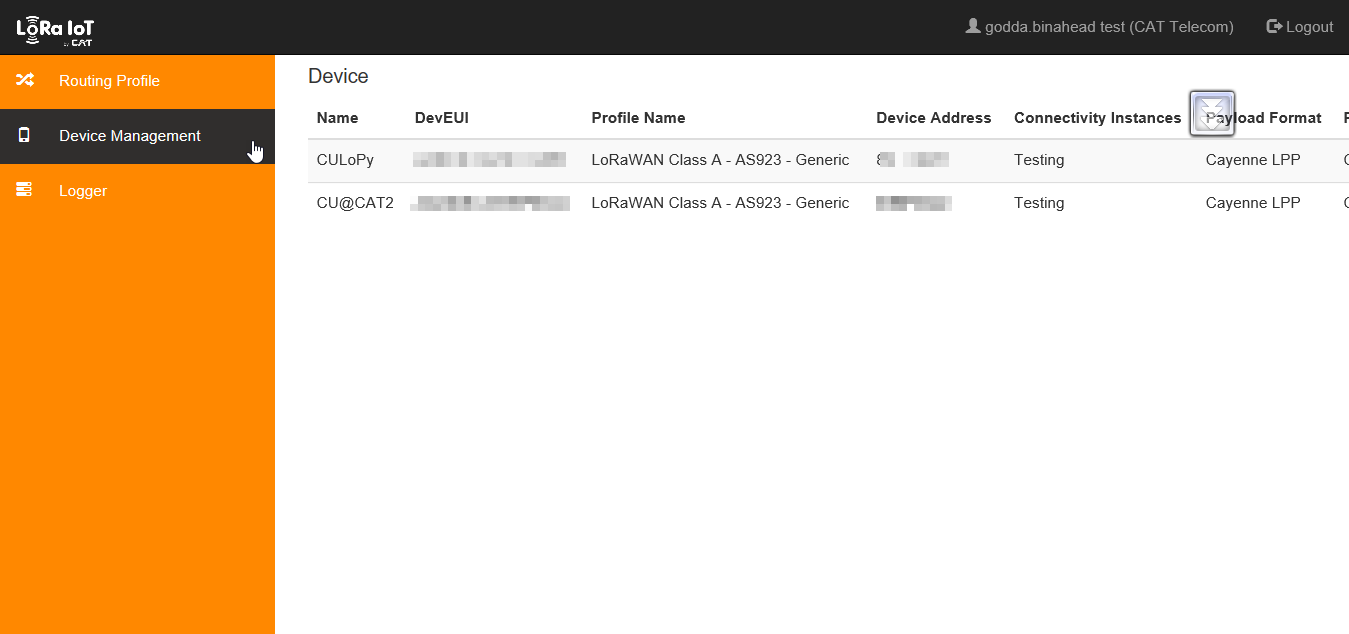
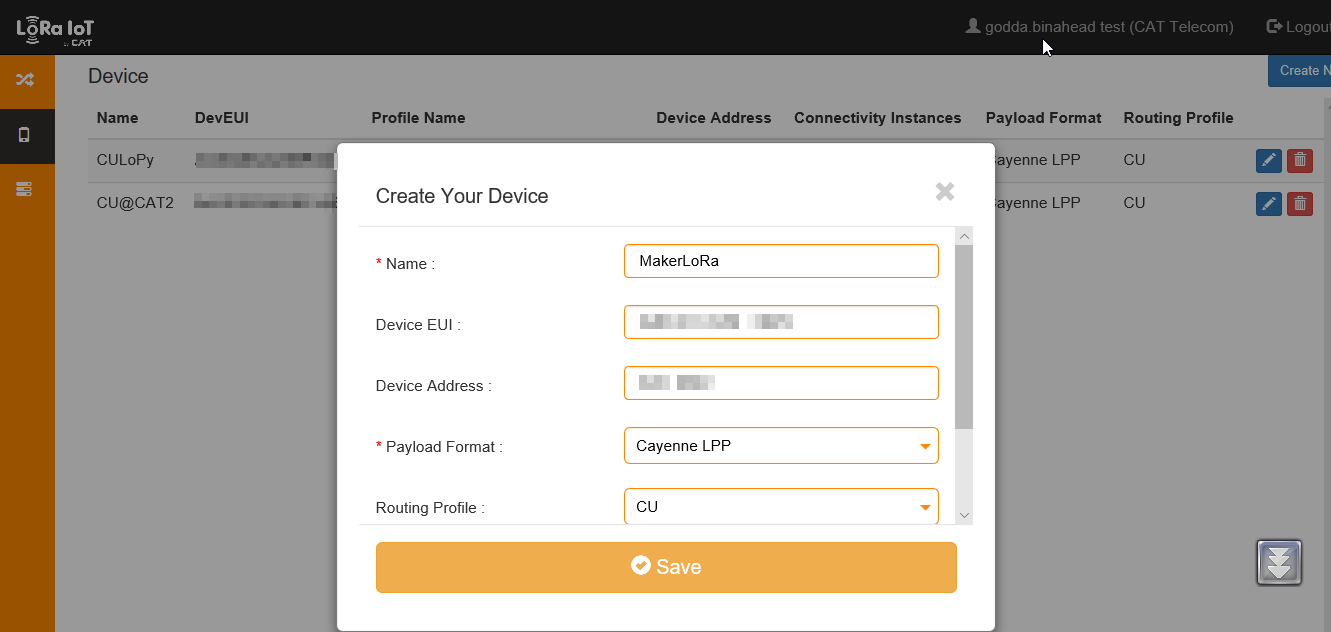
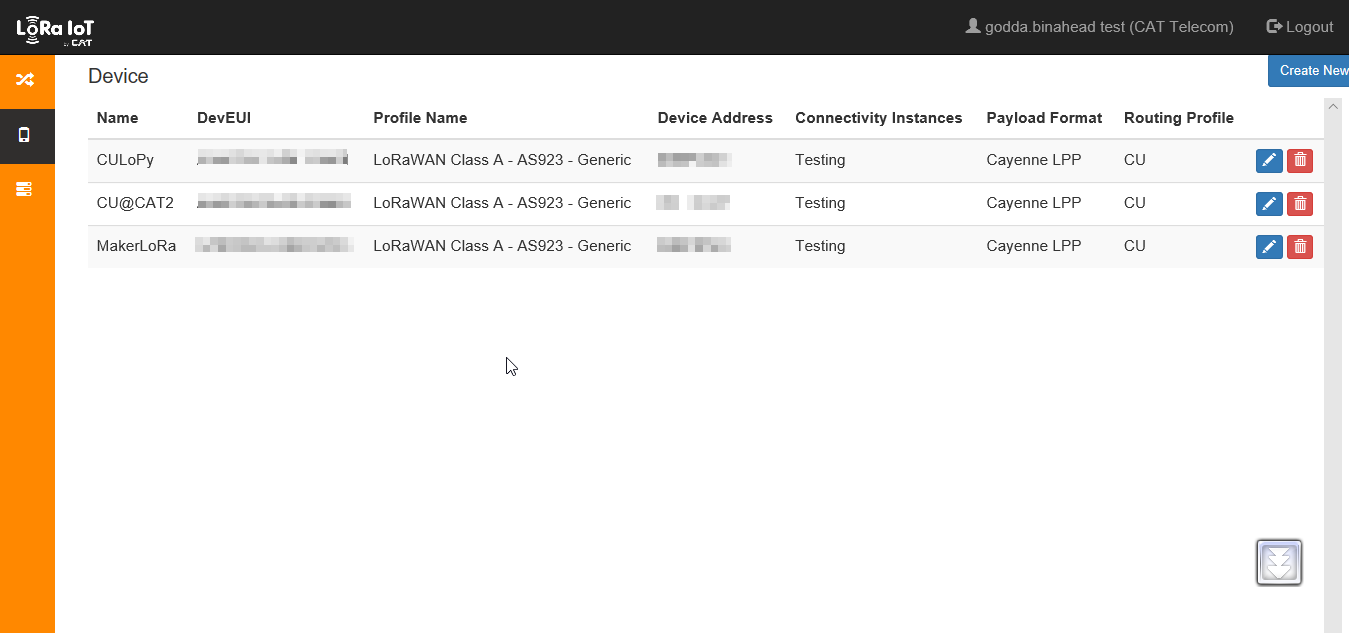
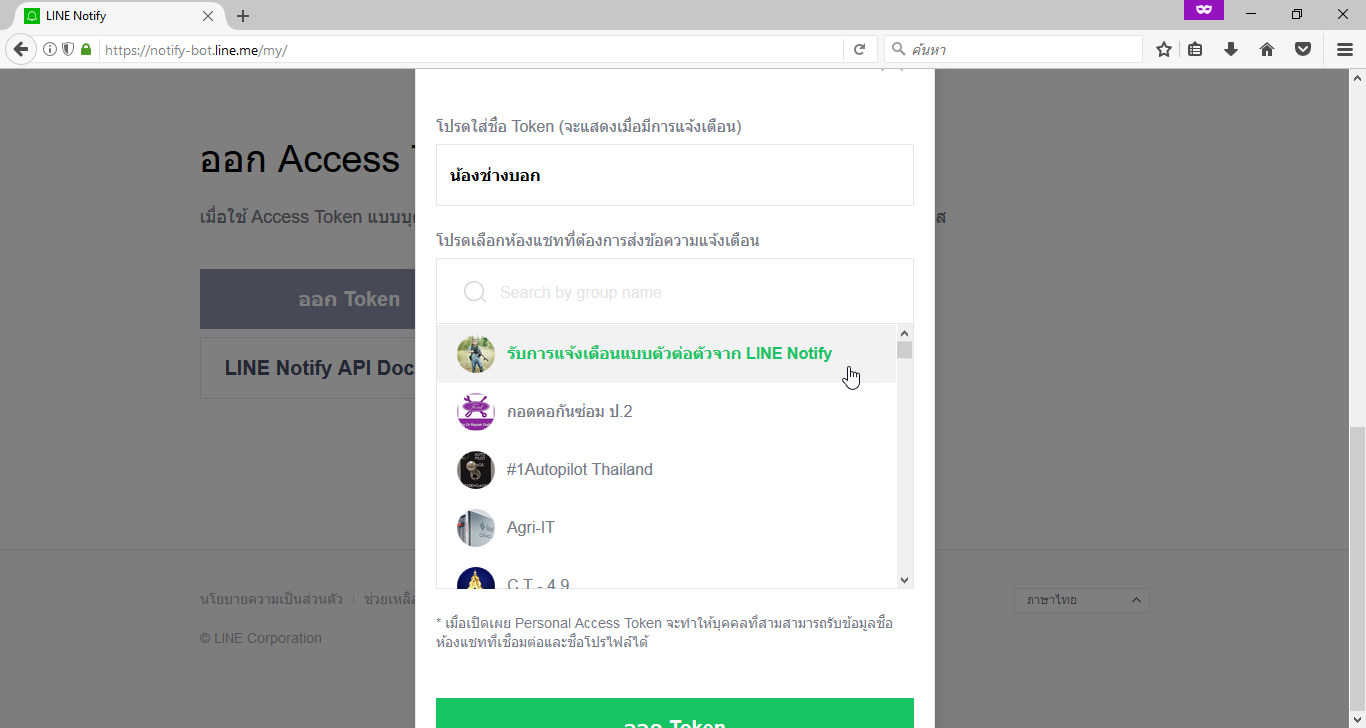
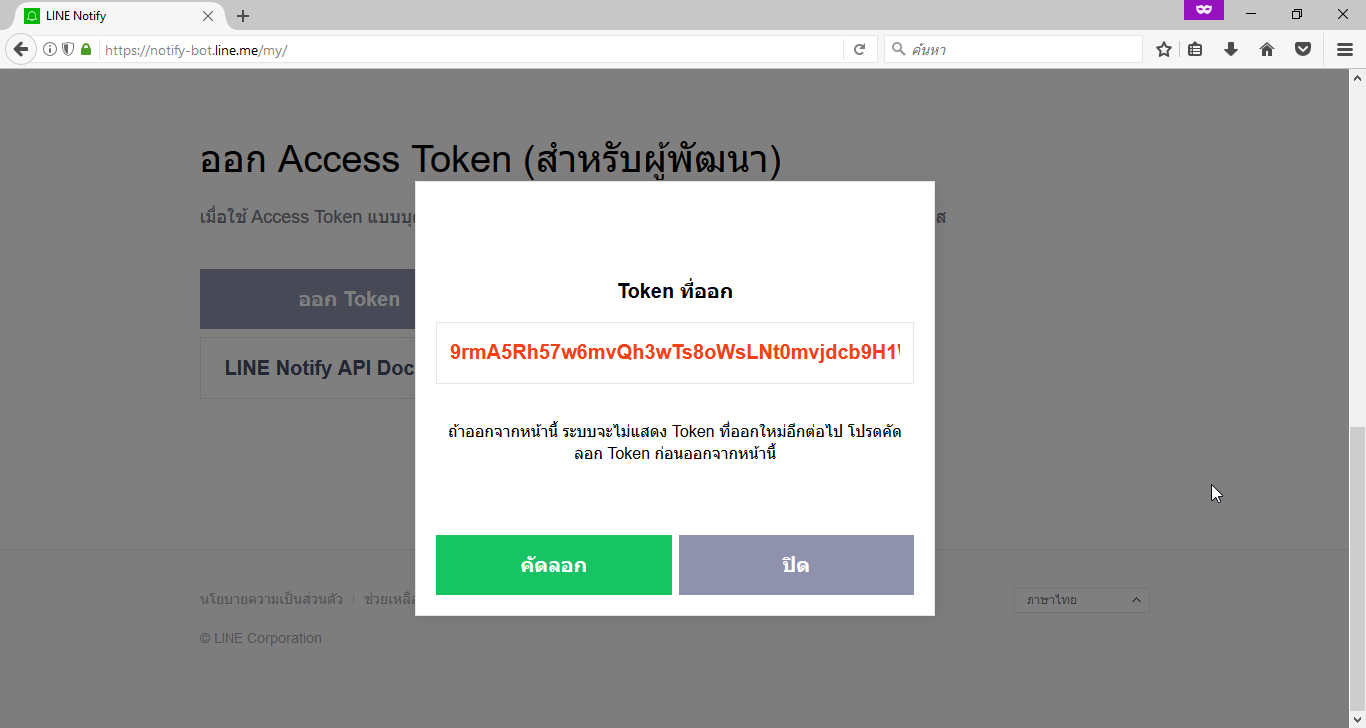
หลังจากที่เรากำหนด Routing Profile เสร็จแล้วก็จะเป็นส่วนสำคัญที่ทุกคนรอคอยแล้วนั่นคือส่วนที่เราจะเพิ่ม node ที่จะเข้ามาใช้งานกับเครือข่ายนั่นเอง ขั้นตอนก็ไม่ได้มีอะไรยุ่งยาก เพียงแค่เปิดหน้าต่าง ใน TAB ของ Device Management เข้ามาที่หน้าต่างนี้จะมีส่วนให้เราเพิ่ม node ที่ต้องการใช้งานหน้าต่างที่แสดงก็เรียบง่ายเข้าใจง่าย มี UX ที่ออกแบบไว้ดีพอสมควร โดยลำดับจะแสดงไว้ดังภาพ
แค่นี้ก็เป็นอันเสร็จเรียบร้อย พร้อมทำงานทางฝั่งหลังบ้านแล้ว กลับมาที่ฝั่งบอร์ดที่เราเตรียมมาทดสอบบ้าง พระเอกของเราวันนี้มีด้วยกันสองแบบคือ แบบ ที่พัฒนาด้วย microPython และ Arduino Platform
สำหรับท่านที่ มี บอร์ด TTGO อยู่ในมือคงใจร้อนกันแล้วงั้นผม ประเดิมให้ก่อนเลยละกัน ส่วน LoPy ผมขอยกมาทึหลังเพราะคาดว่าหลายท่านยังไม่ได้ถอยมาเป็นของตัวเองกันซักเท่าไหร่
เริ่มที่ เราเปิดโปรแกรม Arduino ขึ้นมา จากนั้นทำการเพิ่ม Library ตัวนึงเข้าไปนั่นคือ
https://github.com/orenonline/arduino-lmic-as923
อ๊ะๆ เดี๋ยวก่อน ผมเชื่อว่าสิ่งที่ทุกคนรีบทำหลังจากบรรทัดนี้คือ รีบโหลดและลงเพื่อทดสอบแน่ๆ ยังก่อนๆอ่านต่ออีกซักนิด เจ้า Lib ตัวนี้ มันไม่ได้ถูกเขียนมาให้ใช้กับ ESP32 ได้ทันที เมื่อเราคอมไพล์แล้วจะเจอ ERROR มาฟาดหน้าเราอย่างแรง อาจจะทำให้ใจฟ่อลงไปได้ ตรงนี้ น้องพฤก Maker หนุ่มวิศวะโทรฯ จุฬา (https://www.facebook.com/pruk.sasithong) ได้ขจัดปัญหาดังกล่าวไว้ให้แล้ว เพราะว่าบอร์ด TTGO ที่ใช้ทดสอบก็คือบอร์ดของน้องเขานั่นเอง โดย LIB ที่ทำการแก้ไขแล้วสามารถ โหลดกันได้ที่นี่ครับ
http://binahead.com/web/wp-content/uploads/2018/02/LMIC-Arduino-AS923-upper-master.zip
เอาล่ะหลังจากโหลดมากันแล้วก็นำไปติดตั้งกันตามปกติได้เลยครับ คราวนี้ก็เพียงเปิดไฟล์ตัวอย่างที่เป็นตัวอย่างของการเชื่อมต่อแบบ ABP ขึ้นมา และใส่ค่าที่เราได้จากทีมงาน CAT ลงไปแล้วก็อัพโหลดลงบอร์ด ก็เป็นอันเรียบร้อยเอาไปเทสโลด ส่วนผลลัพธ์เดี๋ยวผมขอนำเสนอในช่วงท้ายหลังจากพูดถึง LoPy เสร็จแล้วนะครับ
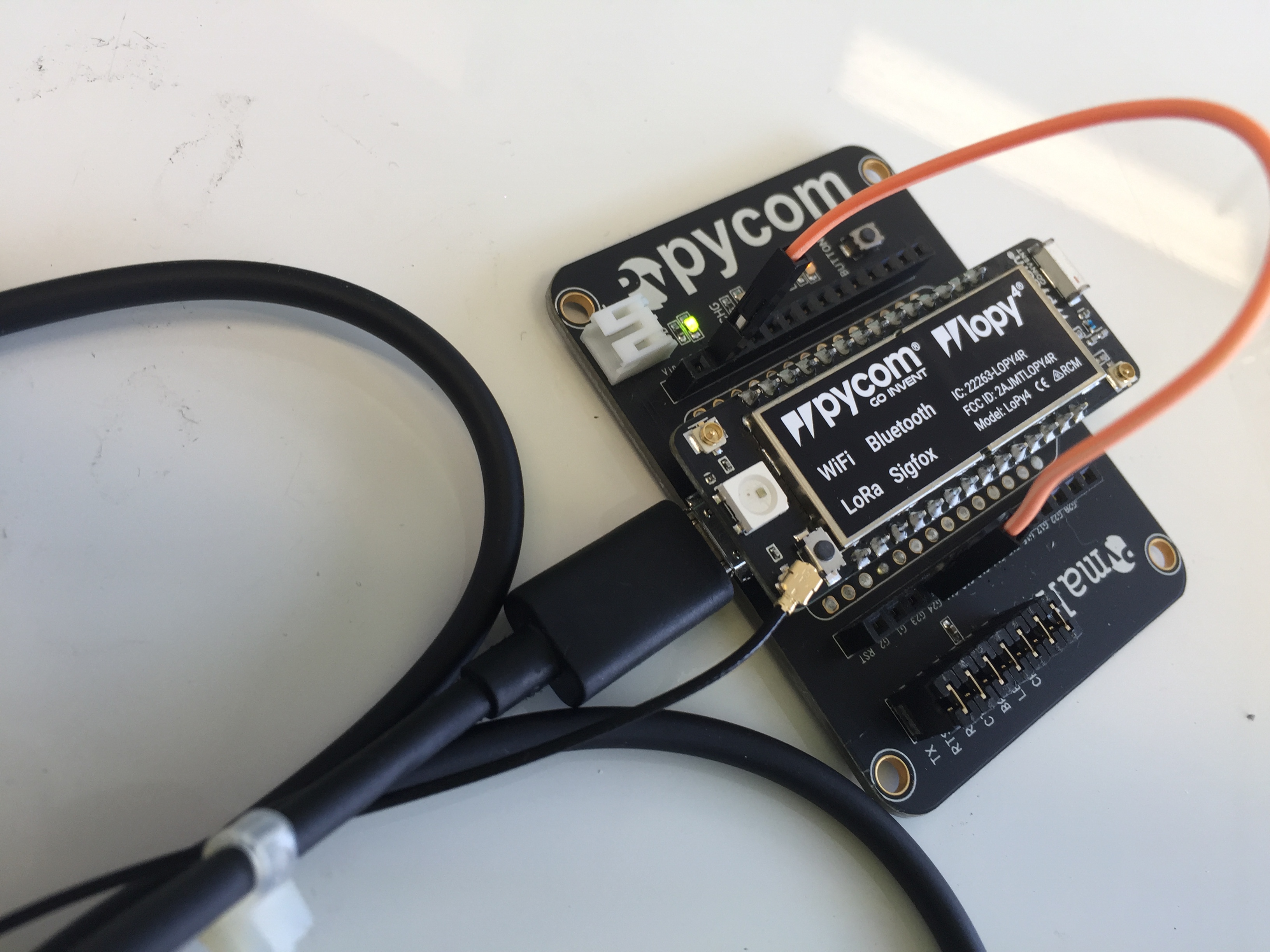
มาๆ มาว่ากันต่อ จริงๆเรื่องนี้ควรเล่าช่วงแรก แต่มันมีของต้องเล่าเยอะเลยยกมาเล่าตอนท้ายแทนดีกว่า บอร์ดที่เราเลือกมาทดสอบอีกตัวนั้นคือ LoPy จากบ. Pycom ตัวบอร์ดออกแบบโดยใช้ ESP32 เป็นส่วนทำงานประกบมากับภาคสื่อสารที่เป็น LoRa ตรงนี้ต้องบอกเลยว่าทีมงาน Pycom ออกแบบบอร์ดมาได้ดีและน่าใช้มาก ต่อในส่วนของการพัฒนา Pycom เลือกใช้ ภาษา microPython เป็นภาษาในการใช้พัฒนา บางท่านอาจจะแหยงๆในแว้บแรก หากว่าไม่เคยใช้งานภาษานี้มาก่อน แต่บอกได้เลยว่า คู่มือและตัวอย่างของ Pycom ทำไว้ได้ดีมากจนผมเองที่พึ่งจะจับมันไม่กี่วันก็ตกหลุมรักความสะดวกและเป็นขั้นเป็นตอนไปในทันที ใครสนใจสามารถเข้าไปอ่านเรียกน้ำย่อยกันก่อนได้ที่ https://docs.pycom.io/ เอามาถึงในส่วนของการทดลองเลยละกัน ในส่วนของเบสิกการใช้งานผมอาจจะขอยกยอดไปก่อนนะครับ ไว้เราหาเวลามานั่งทำความเข้าใจในการพัฒนาบนภาษา microPython กันอีกทีนึงนะครับ
สำหรับการทดลองเราสามารถทำได้ง่ายๆโดยก่อนอื่นเราต้องติดตั้งเครื่องมือที่ใช้ทำงานกันก่อน โดยในเว็บของ Pycom จะแนะนำไว้ด้วยกันสองตัวคือ ATOM และ Visual Studio Code โดยทางทีม Pycom จะมีปลั๊กอินตัวหนึ่งชื่อ Pymakr เพื่อใช้เป็นเครื่องมือในการพัฒนา ทุกท่านสามารถทำตามได้จากเนื้อหาในคู่มือดังนี้
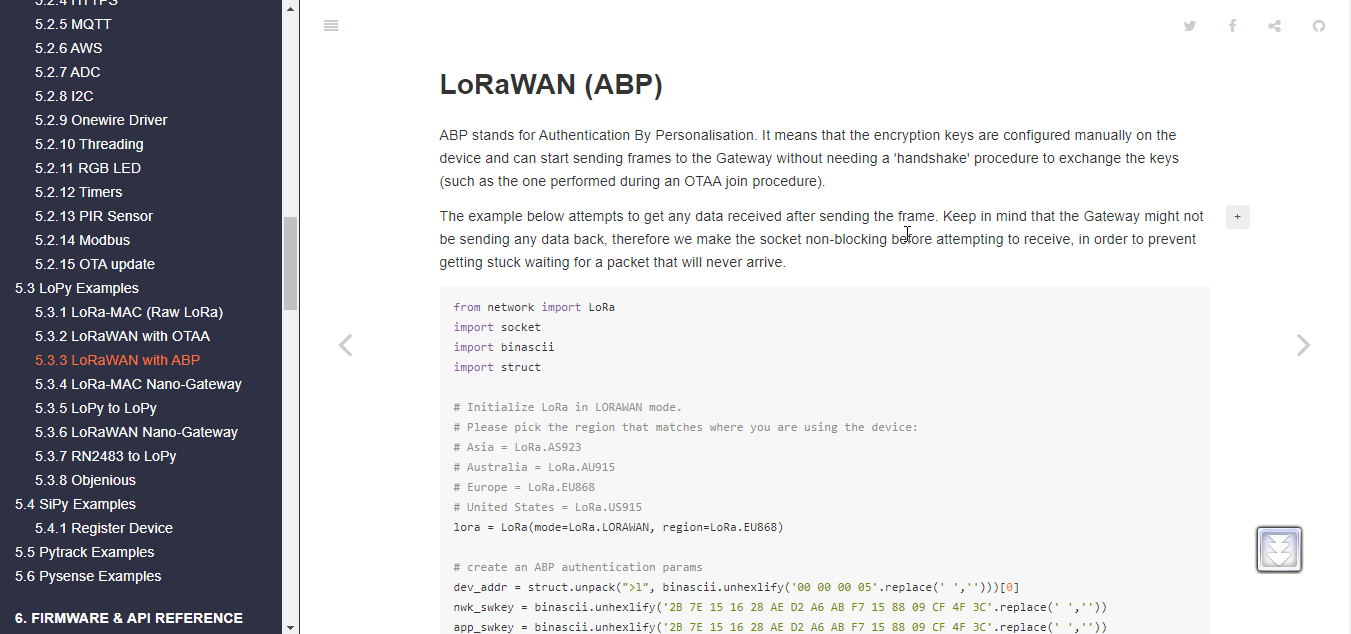
ต่อมาเราก็แค่เชื่อมต่อบอร์ดเข้ากับคอมพิวเตอร์ของเรา และ เปิดตัวอย่างสำหรับการสื่อสารในรูปแบบ ABP ขึ้นมาตามคำแนะนำใน Document ได้เลย
วิธีการก็ง่ายๆไม่ซับซ้อนเพียง คัดลอกตัวอย่างลงมาวางใน ไฟล์ main.py จากนั้นทำการแก้ไขค่า key ต่างๆตามที่ได้รับจากทีมงานของ CAT
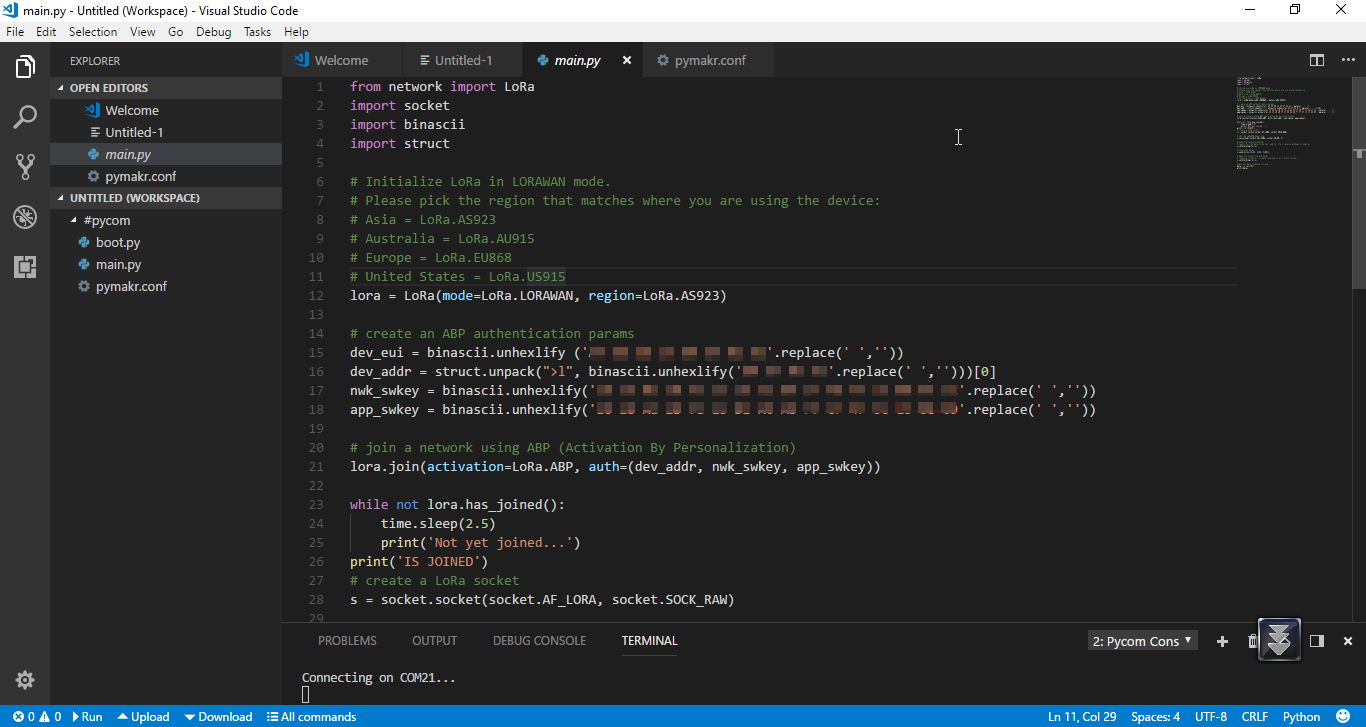
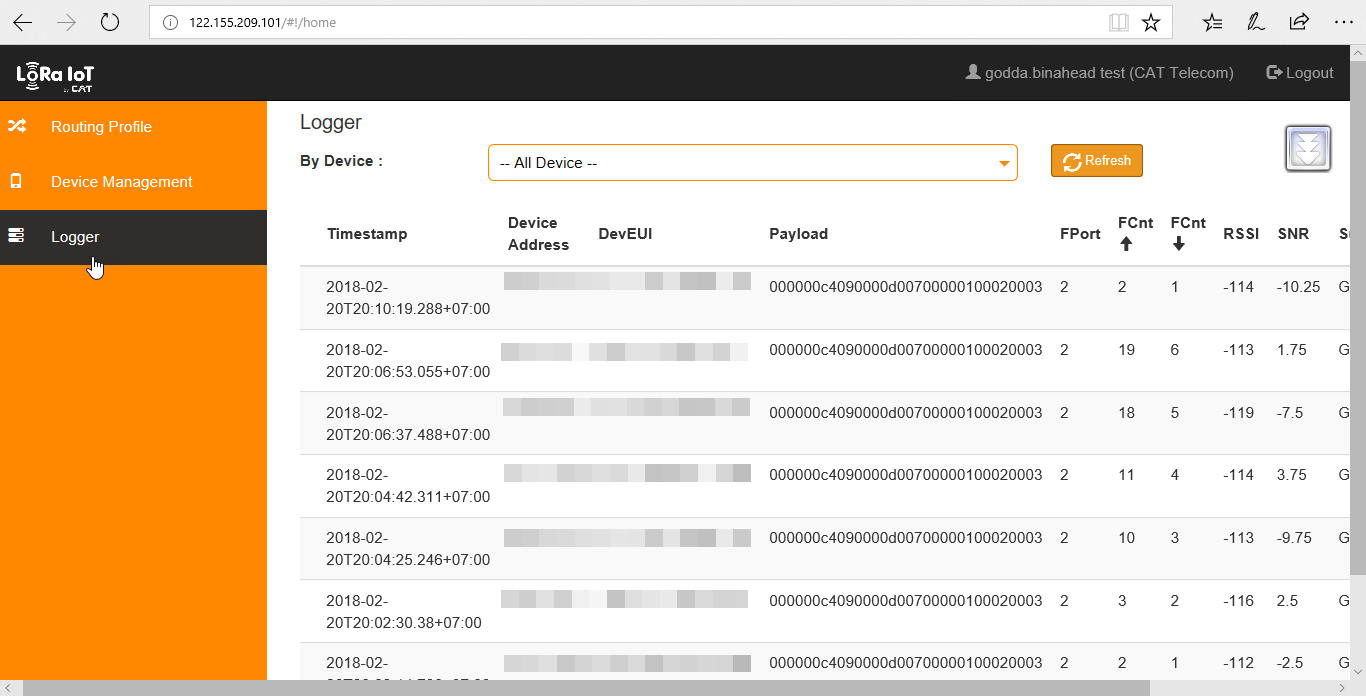
แต่ตัวอย่างนี้จะขาดอยู่อย่างนั่นคือ การกำหนด EUI แต่ก็ไม่ได้เป็นอุปสรรคอะไร เพราะทางผมได้นำส่งบอร์ดส่วนนึงให้กับทางทีมงาน CAT ไปก่อนวันนัดทดสอบเพื่อให้ทางทีมงาน CAT ได้ไปลองเล่นทำความคุ้นเคยมาก่อน ผลคือ ทีมงานได้ทดลองเบื้องต้นมาก่อนแล้วระดับนึงทำให้วันนี้เราเบาใจไปได้เปราะว่าบอร์ด LoPy ทำงานได้แน่นอน โดยทีมงาน CAT ได้เสียบบอร์ดทดสอบการทำงานให้ดูโดยเปิดหน้าต่างการแสดงของ Logger ก็ได้ผลลัพธ์ว่ามีการเชื่อมต่อเข้ามาจริงๆ ด้วยความรีบร้อนละคนตื่นเต้นผมจึงรีบเพิ่มเติมคำสั่งส่วนที่เหลือลงไป ดังนี้
ก็เป็นอันเสร็จ เราจึงอัพโหลดไฟล์เข้าบอร์ดผ่านคำสั่งทันที แต่มีเหตุให้ต้องตกใจ นั่นคือ เมื่ออัพไปแล้วเจ้าบอร์ดตัวดีมันก็นิ่งไปเสียเฉยๆ เอาไงดีได้แต่มองตากันเลิกลัก หันไปหาทีมงานของ CAT ว่าของเขาทำอย่างไรทำไมจึงได้ทางทีมก็ต่อบอร์ดให้ดูว่ามีการส่งสัญญาณเข้า เอ..เอายังไงดี ทางผมเลยตัดสินใจ อัพเฟริมแวร์เพราะคิดว่าอาจจะเป็นเพราะเวอร์ชั่นผมไม่ตรงกันหรือไม่เพราะระหว่างที่ ทดสอบมาสองสามวัน ทาง Pycom จะส่งข้อความมาให้อัพผ่านทางโปรแกรเม upgrade firmware บ่อยมาก (มารู้ตอนหลังว่าบางครั้งไม่ต้องบ้าจี้ตามก็ได้ถ้าไม่ใช่อัพเดธร้ายแรงอะไร) ผมจึงทำการอัพทันที แต่แว้บสุดท้ายก่อนกดอัพเห็นตัวหนังสือเบ้งๆว่า เวอร์ชั่นเฟริมแวร์ที่กำลังจะยัด มีตัว b ห้อยท้ายแต่ไม่ได้เอะใจอะไร กดไปอย่างเร็วพลัน ด้วยความร้อนใจอยากเล่นต่อแล้ว เมื่ออัพเสร็จทำการอัพโหลดไฟล์เข้าไป ในใจนี่หวังไว้อย่างมั่นเหมาะเอาละมันต้องได้ซักทีแล้วนะ ผลคือนิ่งสนิท(55555 ขำประชดตัวเอง) ไม่เป็นไรคิดได้โดยอึดใจ หันไปหาทีมงาน CAT ขอแลกบอร์ดกับเขาเผื่อว่าบอร์ดเราจะเน่าแล้ว เอามาเสียบแล้วรีบอัพโดยพลัน อ่าว อัพไม่ได้ก็เข้าใจไปเองว่ามันมีปัญหา(จริงแล้วเป็นเรื่องของ loop การทำงานภายใน) เลยสั่งอัพเฟริมแวร์ให้บอร์ดนี้ด้วยเช่นกัน หายนะมันเกิดตอนนี้ ปรากฎหลังจากอัพเฟริมแวร์และอัพโหลดไฟล์แล้ว ทุกอย่างหยุดนิ่งไปหมดจึงส่งต่อกลับไปให้ทางทีม CAT ช่วยใส่ไฟล์ CODE ที่เขาลองมาก่อนที่มันทำงานได้ในตอนแรก แล้วลุ้นด้วยใจจดจ่อ แต่สุดท้ายก็ทำงานไม่ได้เช่นกันระหว่างที่งุนงง กับสิ่งที่เกิด


ขณะเดียวกันนั้นก็มีพี่ทีม (https://www.facebook.com/sweetzteam) ตามมาสมทบ ซึ่งมาพร้อมกับบอร์ดอื่นๆที่อยากใช้ทดสอบในวันนี้ด้วยนั่นคือบอร์ด RaspberryPi และบอร์ดของ Seedstudio แต่ยังไม่ทันพี่ทีมจะได้ขยับตัวผมก็ลากมาช่วยกันแก้ปัญหาตรงหน้าทันที แต่ทุกคนก็ได้ผลลัพธ์ที่เหมือนกัน คือมันนิ่งไปเลย ฟางเส้นสุดท้ายผมโทรตามคุณโอ๋ (https://www.facebook.com/Teerawut.chitphomma) ให้มาช่วยเสริมทัพเพราะผมคาใจกับประเด็นนี้มาก ไม่นานเท่าไหร่นักคุณโอ๋ก็ปรากฏตัวพร้อมบอร์ดสำรองหอบใหญ่กะคร่าวๆก็ราวสิบกว่าบอร์ดได้ พร้อมคำพูดเท่ๆว่า ลูกพี่ให้เอามาด้วยถ้ามีปัญหาจะได้เปลี่ยนเลย ลุยได้เลยครับ แหมะ..ไฟในตัวผมนี่ลุกโชนเลย เหตุการณ์ดำเนินไป เป็นห้วงเวลาหนึ่ง
ทุกคนช่วยกันปล้ำมันอยู่ได้พักใหญ่จนผมเริ่มเอะใจ กับเจ้าตัว b ในขั้นตอนอัพเฟริมแวร์เมื่อกี้ จึงได้สอบถามทีม CAT ว่าเวอร์ชั่นเราไม่ตรงกันใช่ไหมกับอันที่ CAT พึ่งทดสอบไปก่อนที่จะมาเจอกัน ได้ความว่า แม่นแล้วสู ห่วย…แค้นตัวเองแท้ ทันใดนั้นความคิดก็แล่นเข้ามาปะทะที่หัวอย่างจัง นี่เราโดน BETA เวอร์ชั่น เล่นงานเอาเสียแล้ว เพื่อให้แน่ใจ จากที่เสียเวลาหลายรอบผมจึงเปิด เอกสารหาข้อมูลว่าเราจะ debug การทำงานอย่างไรได้บ้างจนไปเจอว่ามันมีคำสั่งให้เราเช็คสถานะการเกาะสัญญาณได้ ผมจึงทำการแทรกคำสั่งนั้นลงไปทันที ผลที่ได้ทำให้ผมสามารถวางมือจากมันได้อย่างหายคาใจ ผลคือ มันสามารถเชื่อมต่อได้ แต่ไปติดปัญหาตรงส่วนการส่งแพคเกจ ด้วยเหตุนี้ผมจึงสรุปแบบรวบตึงว่า คงเป็นเพราะเวอร์ชั่นเฟริมแวร์ที่อัพกันไปตอนล่าสุดแน่ๆ จึงได้ยุติการทดสอบไว้แต่เพียงเท่านั้นเพราะในเว็บของ Pycom ไม่มี เฟริมแวร์เก่าให้เราใช้ทำ Rollback ได้ และได้หันไปทดสอบบอร์ดอื่นๆต่อจนเป็นที่มาของข้อสรุปการทดสอบของวันนี้ โดยในส่วนของ LoPy นั้นผมอิงตามผลลัพธ์ของทีมงาน CAT และบันทึกผลการทำงานผิดพลาด ที่เกิดขึ้นหลังจากที่อัพเฟริมแวร์ ตัวล่าสุด และฝากคุณโอ๋ประสานงานกับทาง Pycom เพื่อหาทางแก้ไขต่อไป ผมคาดว่าน่าจะกลับมาทำงานเป็นปกติหลังจากมีการปรับเฟริมแวร์ใหม่ออกมาอย่างแน่นอน(ซึ่งมันอัพถี่มากให้ตายเถอะแค่ช่วงสองสามวันที่ผมได้บอร์ดมามันมีเวอร์ชั่นให้อัพไม่ซ้ำเลยแต่ละวัน) สำหรับใครที่ถอย LoPy มาแล้วก็ขอให้ระมัดระวังเรื่องนี้นิดนึงนะครับ ผมเจ็บมาก่อนแล้วไม่อยากให้ทุกท่านพลาดแบบเดียวกันครับ
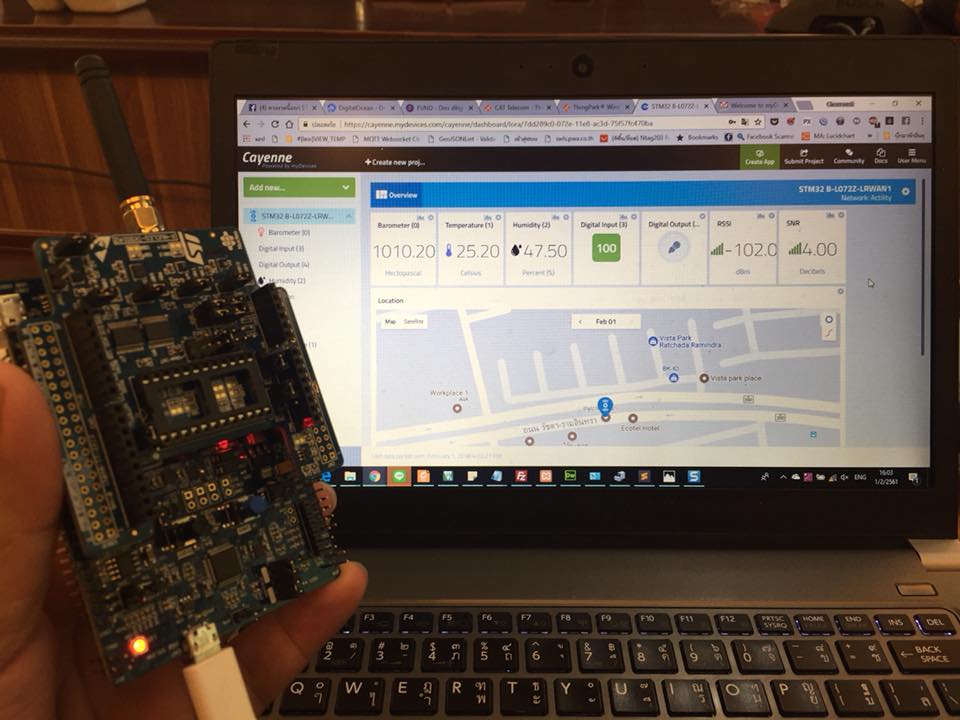
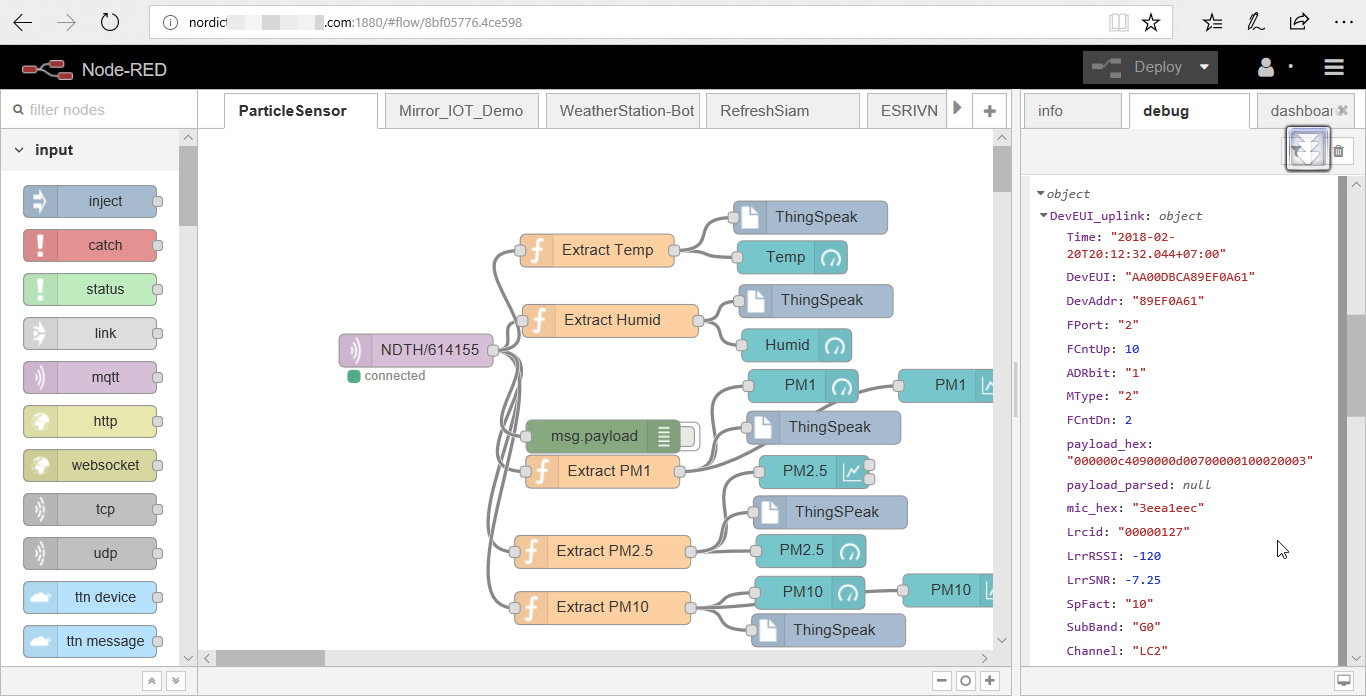
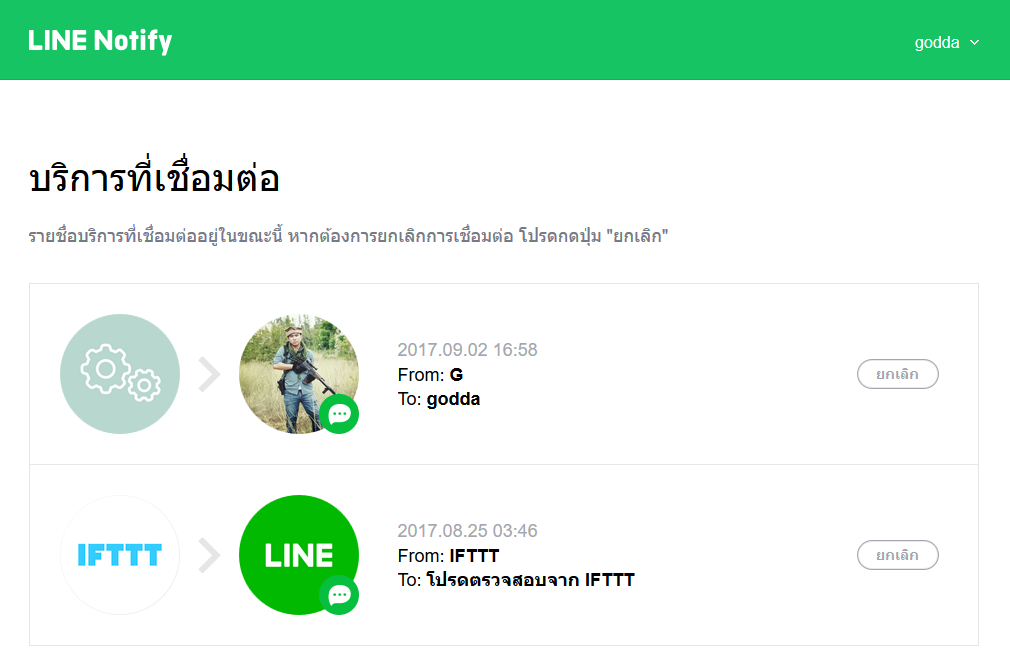
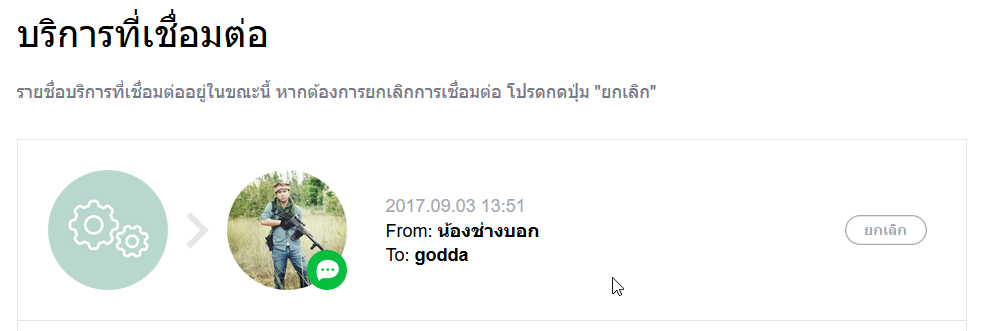
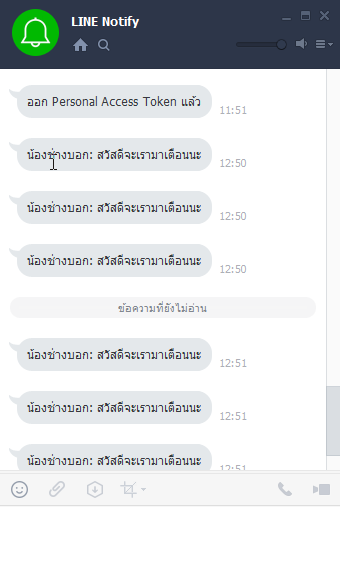
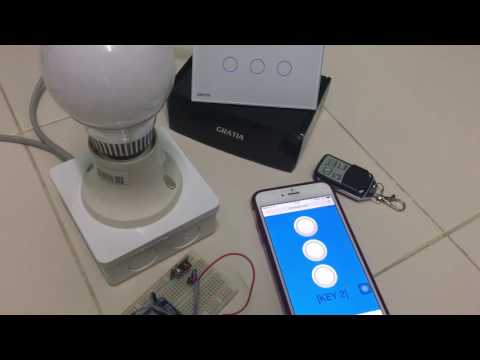
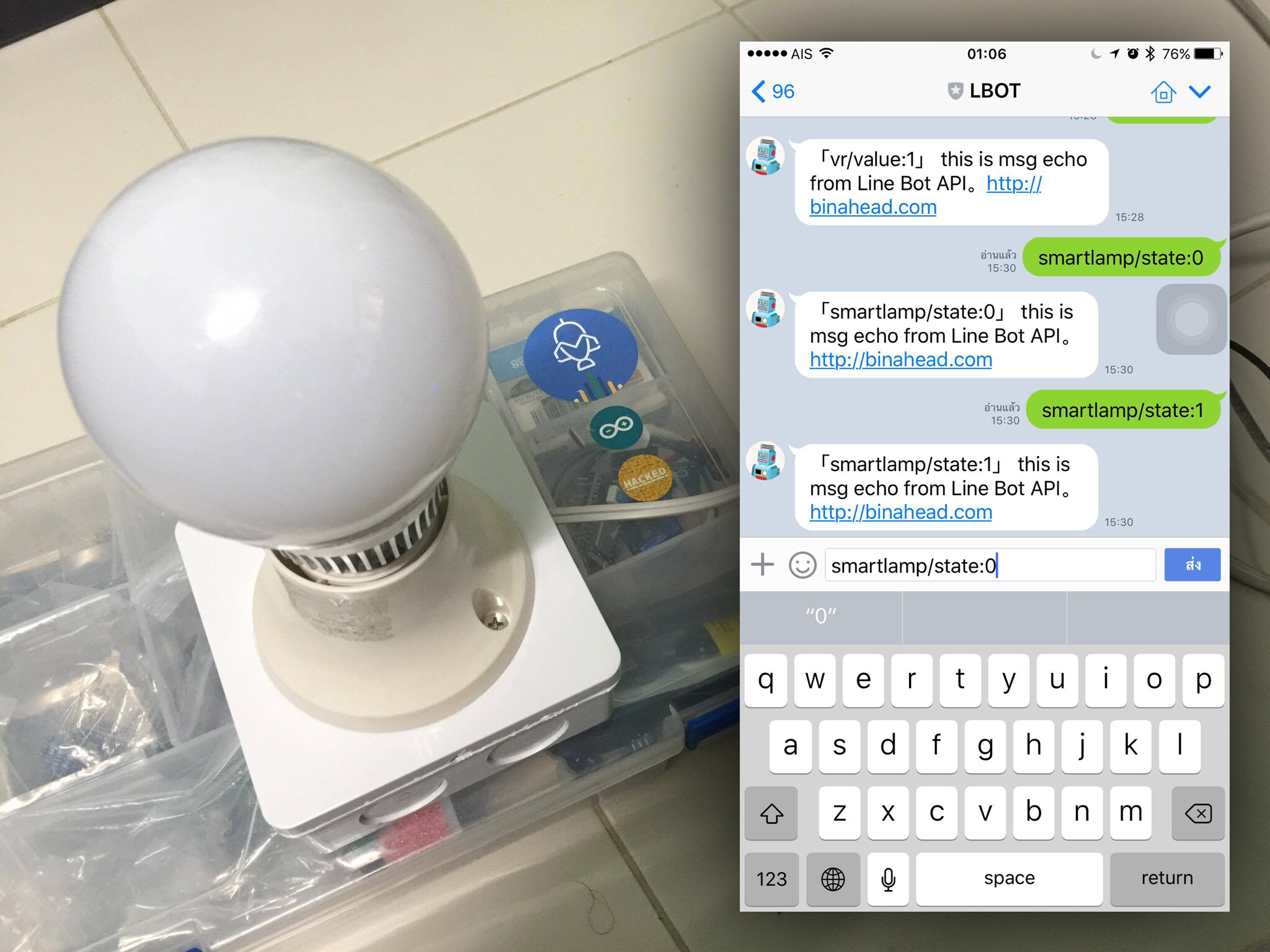
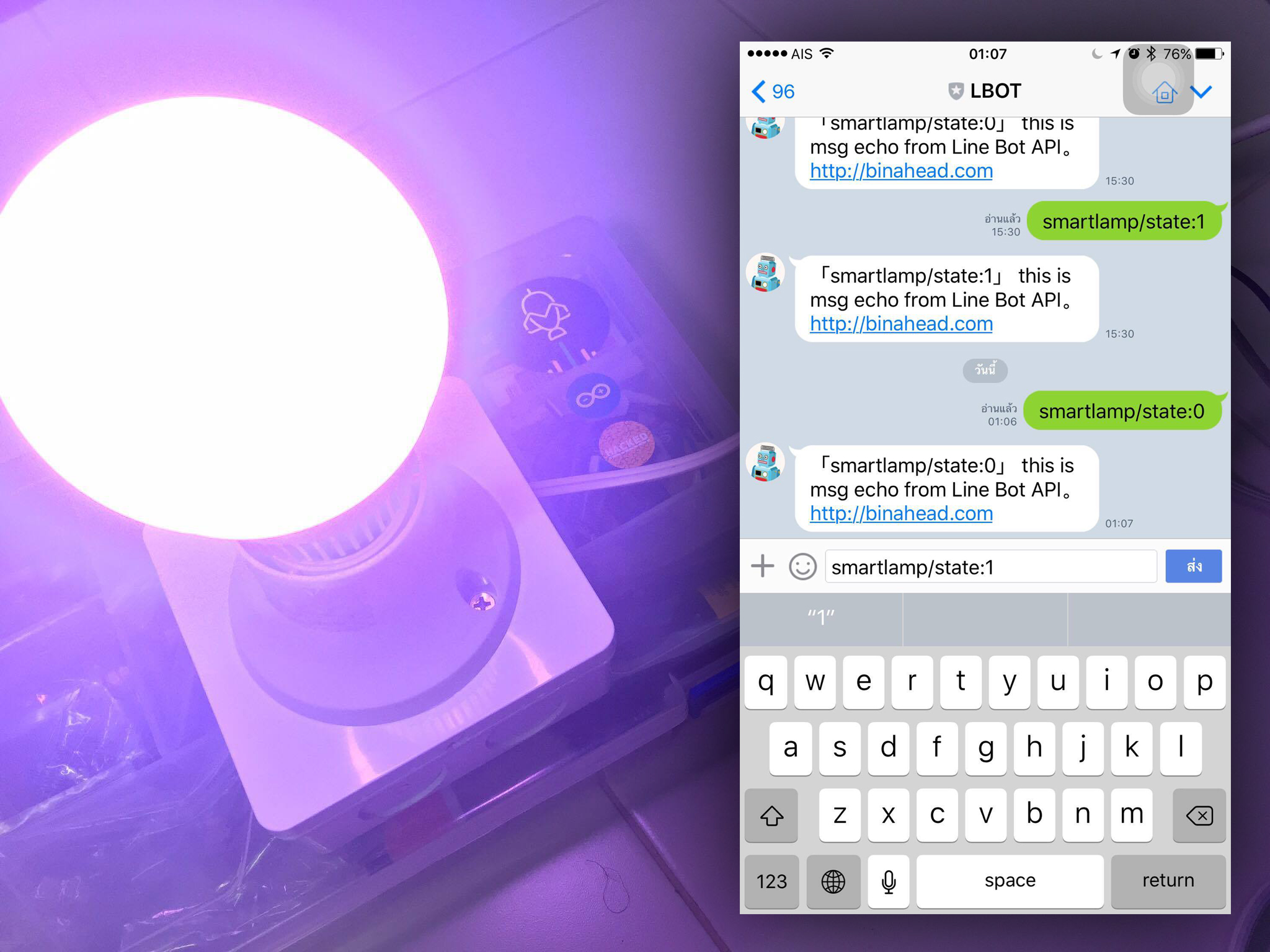
สำหรับผลลัพธ์ หลังจากทดลองกับบอร์ดต่างๆก็ได้ผลลัพธ์ออกมาดังภาพคือมีข้อมูลไหลเข้ามาที่ ระบบของ CAT และสามารถส่งต่อไปยัง server ภายนอกที่เราทำไว้รอรับข้อมูลได้เป็นอย่างดี ดังที่จะเห็นได้จากส่วนของ server ของพี่ทีมที่ช่วยอนุเคราะห์ทดสอบให้ โดยกลไกที่มาใช้รับนั้นจะใช้ widget ที่เป็น HTTP ขึ้นมาทำเป็น API ไว้รอรับและนำค่าไปใช้ต่อได้ทันทีครับ
ท้ายสุดนี้ขอขอบคุณทีมงานทุกคน พี่ๆเพื่อนๆ Maker ที่มาร่วมกันทดสอบเพื่อให้ได้ข้อสรุปในครั้งนี้ด้วยนะครับ และที่จะไม่เอ่ยถึงเลยเสียมิได้คือ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย เจ้าของพื้นที่ ที่เปิดกว้างให้เราได้เข้าใช้เพื่อทดสอบในครั้งนี้ด้วยครับ สำหรับบทความนี้ต้องขอลาไปก่อน พบกันใหม่บทความหน้านะครับ…สวัสดีครับ



























You must be logged in to post a comment.